4 formas de mejorar la eficiencia de tu controlador PID
Si quieres maximizar la eficiencia de tu controlador PID, este artículo te lo cubre.
Te proporcionaremos cuatro formas prácticas de mejorar su rendimiento.
Al comprender los conceptos básicos del control PID y optimizar los parámetros de ajuste, puedes afinar la respuesta de tu controlador.
La implementación del control de avance y las técnicas de anti-reset windup mejoran aún más la precisión y la estabilidad.
Para ir un paso más allá, exploraremos técnicas de filtrado y suavizado, control en cascada, algoritmos avanzados y automatización de procesos para obtener resultados óptimos.
¡Vamos a sumergirnos!
- Comprender los fundamentos del control PID
- Optimizar los parámetros de ajuste del controlador
- Implementar Control de Avance
- Utilice técnicas de anti-reset windup.
- Aplicar técnicas de filtrado y suavizado
- Utilizar estrategias de control adaptativo.
- Implementar Control en Cascada
- Integrar algoritmos de control avanzados
- Aprovechar la automatización de procesos e integración
- Monitorizar de forma continua y ajustar el rendimiento del controlador PID
-
Preguntas frecuentes
- ¿Cómo puedo determinar los valores iniciales de las ganancias proporcional, integral y derivativa de mi controlador PID?
- ¿Cuáles son los desafíos comunes que se enfrentan al implementar el control de retroalimentación en un sistema PID?
- ¿Puede proporcionar ejemplos de diferentes tipos de técnicas de anti-reset windup que se pueden utilizar en un controlador PID?
- ¿Hay alguna técnica de filtrado y suavizado específica que se utilice comúnmente para mejorar el rendimiento de un controlador PID?
- ¿Cómo se pueden utilizar las estrategias de control adaptativo en un sistema PID para mejorar la eficiencia?
- Conclusión
Comprender los fundamentos del control PID
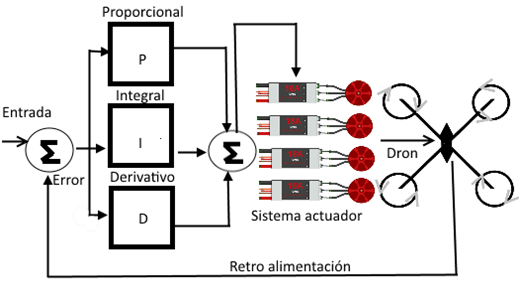
Para mejorar la eficiencia de su controlador PID, es importante entender los conceptos básicos del control PID. El acrónimo PID significa Proporcional-Integral-Derivativo, que son los tres componentes principales de un lazo de control PID. Estos componentes trabajan juntos para mantener un valor deseado o punto de ajuste.
Primero, discutamos el componente proporcional. Esta parte del controlador toma en cuenta la diferencia entre la variable de proceso actual y el punto de ajuste. Luego, multiplica esta diferencia por una constante conocida como ganancia proporcional. Cuanto mayor sea la ganancia proporcional, más rápida y agresiva será la respuesta.
A continuación, tenemos el componente integral. Este componente analiza cuánto tiempo y cuánto error se ha acumulado con el tiempo. Integra este error y lo multiplica por otra constante conocida como ganancia integral. El componente integral es responsable de eliminar cualquier error en estado estable que pueda ocurrir.
Por último, está el componente derivativo. Esta parte considera qué tan rápido o lento está cambiando la variable de proceso en relación al tiempo. Al multiplicar esta tasa de cambio por otra constante llamada ganancia derivativa, ayuda a anticipar cambios futuros para reaccionar adecuadamente y prevenir sobrepasamientos u oscilaciones.
Comprender estos conceptos básicos de la sintonización del PID le permite ajustar las ganancias de cada componente según los requisitos específicos de su sistema. Sintonizar adecuadamente estas ganancias puede llevar a una mayor estabilidad, tiempos de respuesta más rápidos, reducción de sobrepasamientos y un mejor rendimiento general del control.
Optimizar los parámetros de ajuste del controlador
Ajustar los parámetros de ajuste puede optimizar el rendimiento de su controlador y mejorar la respuesta en bucle cerrado. Al afinar estos parámetros, puede asegurarse de que su controlador PID (Proporcional-Integral-Derivativo) funcione de la mejor manera. El proceso de ajuste implica ajustar la ganancia proporcional (Kp), la ganancia integral (Ki) y la ganancia derivativa (Kd) para lograr un control estable y eficiente de su sistema.
Para ayudarlo a comprender el impacto de estos parámetros de ajuste, considere la siguiente tabla:
| Parámetro de ajuste | Efecto en la respuesta del control |
|---|---|
| Ganancia proporcional | Determina la estabilidad del sistema y la velocidad de respuesta |
| Ganancia integral | Elimina el error en estado estacionario en la respuesta del control |
| Ganancia derivativa | Mejora la estabilidad mediante la reducción del sobrepaso |
Optimizar el rendimiento de su controlador requiere encontrar el equilibrio adecuado entre estos tres parámetros. Aumentar la ganancia proporcional puede hacer que su sistema responda más rápido, pero también puede provocar inestabilidad o sobrepaso. Por otro lado, aumentar la ganancia integral puede ayudar a eliminar errores en estado estacionario, pero puede introducir oscilaciones si se configura demasiado alto. Por último, aumentar la ganancia derivativa mejora la estabilidad al amortiguar cualquier cambio rápido en el error de control.
Para optimizar el rendimiento de su controlador, se recomienda comenzar con un valor bajo para cada parámetro de ajuste y aumentarlos gradualmente hasta que se logren los resultados deseados. Es crucial observar cómo afecta cada ajuste a la respuesta general del control y realizar cambios incrementales pequeños en consecuencia.
 Implementar Control de Avance
Implementar Control de Avance
Para optimizar tu sistema de control, es esencial implementar el control en avance. Al hacerlo, puedes reducir el retardo del control, mejorar el rechazo de perturbaciones y aumentar la estabilidad general del sistema.
El control en avance te permite anticipar las perturbaciones y aplicar las acciones correctivas necesarias de manera anticipada, minimizando el tiempo de respuesta y mejorando el rendimiento del sistema. Además, ayuda a reducir los errores causados por factores externos y mejora la precisión de tu sistema de control.
Reducir el retardo de control
Una forma de mejorar la eficiencia de tu controlador PID es reduciendo el retardo de control. El retardo de control se refiere al tiempo que pasa entre un cambio en el sistema y el ajuste correspondiente realizado por el controlador. Al minimizar este retardo, puedes mejorar la capacidad de respuesta y precisión de tu controlador.
Para reducir el retardo de control, hay varias estrategias que puedes emplear. Primero, asegúrate de que tu controlador tenga una alta tasa de muestreo para que pueda capturar rápidamente los cambios en el sistema. Además, optimiza tu algoritmo de control para minimizar cálculos innecesarios que puedan introducir retrasos.
Otro método efectivo es utilizar técnicas avanzadas de hardware o software diseñadas específicamente para reducir la latencia de control. Estas tecnologías pueden disminuir significativamente el tiempo que tarda tu controlador PID en responder a los cambios en el sistema.
En resumen, reducir el retardo de control es crucial para mejorar el rendimiento de tu controlador PID. Al minimizar el retardo y la latencia de control, puedes lograr un control más preciso y eficiente sobre el comportamiento de tu sistema.
| Estrategias | Descripción |
|---|---|
| Aumentar la tasa de muestreo | Mejora la capacidad de respuesta aumentando la frecuencia con la que tu controlador PID muestrea las variables del sistema |
| Optimizar el algoritmo de control | Simplifica los cálculos dentro de tu algoritmo para minimizar los retrasos innecesarios |
| Utilizar técnicas avanzadas | Emplea soluciones de hardware o software especializadas diseñadas para sistemas de control de baja latencia |
| Implementar control predictivo | Utiliza algoritmos predictivos que anticipen los cambios futuros para ajustar de manera preventiva |
Mejorar el rechazo de perturbaciones
Para mejorar el rechazo de perturbaciones, es importante optimizar el tiempo de respuesta del controlador y minimizar cualquier retraso entre los cambios y ajustes del sistema. Al hacerlo, puedes mejorar el rendimiento general de tu controlador PID y asegurarte de que rechace eficazmente las perturbaciones en tu sistema.
Una forma de optimizar el rendimiento del control es ajustando los parámetros de ganancia del controlador. Aumentar la ganancia proporcional puede hacer que el sistema responda más rápidamente a las perturbaciones, mientras que aumentar la ganancia integral puede ayudar a reducir los errores en estado estacionario. Además, ajustar la ganancia derivativa puede mejorar la estabilidad y amortiguar las oscilaciones.
Otro método para mejorar el rechazo de perturbaciones es implementar el control feedforward. Esta técnica implica utilizar un modelo del sistema para predecir las perturbaciones y aplicar acciones de control apropiadas de antemano. Al anticipar y compensar las perturbaciones, puedes minimizar su impacto en la salida de tu sistema.
Aumentar la estabilidad general del sistema
Para aumentar la estabilidad general de tu sistema, hay varias estrategias que puedes emplear. Al implementar estas técnicas, puedes mejorar la precisión de tu controlador PID y minimizar los errores de control.
Aquí hay cinco métodos clave para lograr esto:
-
Ajuste de parámetros: Ajustar adecuadamente las ganancias proporcional, integral y derivativa de tu controlador PID puede mejorar significativamente la estabilidad.
-
Filtro derivativo: Agregar un filtro pasa bajo al término derivativo reduce el ruido y evita oscilaciones innecesarias.
-
Mecanismo anti-saturación: Implementar una función anti-saturación limita la saturación del integrador durante grandes errores de control y asegura una mayor estabilidad.
-
Optimización de la frecuencia de muestreo: Aumentar la frecuencia de muestreo permite tiempos de respuesta más rápidos y mejora la dinámica del sistema.
-
Calibración de sensores: La calibración precisa de los sensores es esencial para asegurar medidas precisas y reducir inexactitudes en las acciones de control.
Utilice técnicas de anti-reset windup.
El uso de técnicas de anti-reset windup puede mejorar significativamente la eficiencia de su controlador PID. El anti-reset windup es un método utilizado para prevenir el integral windup, que ocurre cuando el integrador del controlador PID se satura y no puede responder adecuadamente a los cambios en el punto de consigna o las perturbaciones.
Para entender cómo funciona el anti-reset windup, echemos un vistazo a la tabla a continuación:
| Acción de Control | Error (e) | Término Integral (I) |
|---|---|---|
| Sin Saturación | e < límite de saturación | I = I + Ki * e |
| Saturación | e > límite de saturación | I = I |
| Anti-Reset Windup | e > límite de saturación | I = I + K_aw * (e - límite de saturación) |
En esta tabla, la acción de control se refiere a si hay o no saturación, saturación o anti-reset windup. El error (e) representa la diferencia entre el punto de consigna deseado y la medición real. El término integral (I) se actualiza en función de diferentes condiciones.
Al implementar técnicas de ajuste de ganancia y anti-reset windup en su controlador PID, puede evitar eficazmente el integral windup y mejorar su rendimiento. El ajuste de ganancia implica ajustar la ganancia proporcional (Kp), la ganancia integral (Ki) y la ganancia derivativa (Kd) del controlador en función de condiciones operativas específicas. Esto permite una mejor sintonización de los parámetros de control para adaptarse a las diferentes dinámicas del sistema.
Aplicar técnicas de filtrado y suavizado
Al aplicar técnicas de filtrado y suavizado, puedes mejorar el rendimiento de tu controlador PID. Estas técnicas ayudan a mejorar la respuesta del controlador al reducir el ruido y minimizar los cambios bruscos en la señal de control.
Aquí hay cinco técnicas importantes que debes considerar implementar:
-
Filtrado pasa bajos: Esta técnica consiste en pasar la señal de entrada a través de un filtro que permite el paso de componentes de baja frecuencia mientras atenúa las componentes de alta frecuencia. Ayuda a eliminar el ruido y las perturbaciones de alta frecuencia de la señal de entrada.
-
Suavizado de la derivada: El término derivada en un controlador PID puede amplificar el ruido de alta frecuencia, lo que lleva a un comportamiento errático. Suavizar el término de la derivada utilizando técnicas como el promedio móvil o el suavizado exponencial puede reducir este efecto y proporcionar una acción de control más estable.
-
Filtrado mediano: Esta técnica consiste en reemplazar cada muestra de una señal con el valor mediano de sus muestras vecinas. Es efectiva para eliminar valores atípicos y picos de la señal de entrada, los cuales pueden interrumpir el proceso de control.
-
Filtrado Kalman: Los filtros de Kalman utilizan modelos estadísticos para estimar los estados del sistema en base a mediciones ruidosas. Al incorporar un paso de estimación en tu controlador PID, puedes obtener información de estado más precisa y mejorar el rendimiento general del control.
-
Filtrado de promedio móvil: Esta técnica calcula un valor promedio sobre una ventana deslizante de muestras recientes. Ayuda a suavizar las fluctuaciones en la señal de entrada, proporcionando una referencia más consistente para el controlador PID.
Implementar estas técnicas de filtrado y suavizado resultará en un mejor rendimiento de control para tu controlador PID. Permiten una mayor estabilidad, una menor sensibilidad al ruido y características de respuesta mejoradas.
Experimenta con diferentes combinaciones de estas técnicas para encontrar lo que funciona mejor para tu aplicación específica.
Utilizar estrategias de control adaptativo.
Utilice estrategias de control adaptativo para mejorar el rendimiento y la respuesta de su controlador PID. Las técnicas de control adaptativo pueden ayudarlo a lograr un mejor control sobre su sistema al ajustar continuamente los parámetros del controlador en función del comportamiento dinámico del proceso.
Al implementar el control adaptativo, es importante comenzar con un análisis exhaustivo del rendimiento de su controlador PID. Esto implica evaluar su capacidad para seguir puntos de ajuste, rechazar perturbaciones y mantener la estabilidad. Al analizar estos aspectos, puede identificar áreas que necesitan mejorar.
Una técnica de control adaptativo popular es el control adaptativo de referencia de modelo (MRAC, por sus siglas en inglés). MRAC utiliza un modelo de referencia que representa la respuesta deseada del sistema. El controlador ajusta continuamente sus parámetros para minimizar el error entre la salida real del proceso y la salida del modelo de referencia. Esto permite la adaptación a cambios en la dinámica del sistema o perturbaciones.
Otro enfoque es la programación de ganancias, que implica el uso de múltiples conjuntos de parámetros PID y seleccionarlos en función de las condiciones de operación u otras variables relevantes. Por ejemplo, se pueden utilizar diferentes conjuntos de parámetros para diferentes rangos de puntos de ajuste o niveles de perturbación.
Es importante tener en cuenta que la implementación de estrategias de control adaptativo requiere una sintonización y validación cuidadosas. Es esencial considerar desafíos potenciales como el ruido en las mediciones de los sensores o las limitaciones en las capacidades del actuador.
Implementar Control en Cascada
El control en cascada es una estrategia poderosa que ofrece varios beneficios en el control de procesos. Al utilizar múltiples lazos de retroalimentación, el control en cascada proporciona un mejor seguimiento del punto de consigna, rechazo de perturbaciones y estabilidad general del sistema.
Sin embargo, implementar el control en cascada requiere una cuidadosa consideración de factores como la selección de sensores, la sintonización del controlador y las posibles interacciones entre los lazos primarios y secundarios.
Beneficios del Control en Cascada
El control en cascada es una estrategia de control avanzada que ofrece varios beneficios en el proceso de control de sistemas. Algunos de los beneficios más destacados son los siguientes:
- Mejora de la estabilidad: El control en cascada permite una mayor estabilidad del sistema al utilizar múltiples lazos de control. Esto se logra al tener un lazo maestro y uno o más lazos esclavos, donde el lazo maestro controla la variable de proceso más lenta y los lazos esclavos controlan las variables más rápidas. Esta configuración ayuda a reducir la interacción entre las variables y mejora
Uno de los beneficios del control en cascada es que permite un control más preciso y estable del proceso. Al implementar el control en cascada, puedes mejorar la precisión del control y reducir la variabilidad del proceso.
Aquí hay cinco ventajas clave:
-
Mejora de la estabilidad: El control en cascada ayuda a estabilizar el sistema al proporcionar una capa adicional de control.
-
Tiempo de respuesta mejorado: Con el control en cascada, el controlador puede responder más rápidamente a los cambios en los puntos de ajuste o las perturbaciones.
-
Reducción de las interacciones: El control en cascada minimiza las interacciones entre diferentes bucles, lo que permite un mejor rendimiento general.
-
Mejor rechazo de perturbaciones: El control en cascada permite un mejor rechazo de las perturbaciones tanto en niveles primarios como secundarios.
-
Opciones de ajuste flexibles: Tienes más flexibilidad para ajustar los controladores de forma independiente y optimizar el rendimiento.
Consideraciones de implementación para el control en cascada
-
Seleccionar el controlador adecuado: Es importante elegir el tipo de controlador adecuado para el sistema en cascada. Los controladores más comunes son el controlador proporcional-integral-derivativo (PID) y el controlador de adelanto-retroceso.
-
Determinar la estructura del sistema: Antes de implementar el control en cascada, es necesario comprender la estructura del sistema y definir las variables de proceso y las variables de control. Esto permitirá diseñar el esquema de control en cascada más eficiente.
-
Sintonización de los controladores: Los controladores en
Ahora que comprendes los beneficios del control en cascada, adentrémonos en las consideraciones de implementación para este diseño de control.
A medida que comiences a implementar el control en cascada en tu sistema, es posible que te encuentres con algunos desafíos en el camino.
Uno de los principales desafíos es determinar la variable de proceso adecuada para utilizar como entrada para cada controlador. Esto requiere una comprensión exhaustiva de las dinámicas de tu sistema e identificar qué variables tienen un impacto significativo en el rendimiento general.
Otro desafío radica en ajustar los parámetros de ambos controladores para garantizar la estabilidad y el rendimiento óptimo. Es necesario realizar ajustes cuidadosos para evitar oscilaciones o exceso de respuesta. Puede requerir ajustes iterativos y experimentación para lograr resultados satisfactorios.
Además, integrar el control en cascada en tu sistema existente puede requerir modificaciones en las interfaces de hardware o software, lo que puede introducir complejidad y posibles problemas de compatibilidad.
Integrar algoritmos de control avanzados
Para mejorar la eficiencia de tu controlador PID, puedes incorporar algoritmos de control avanzados que mejorarán su rendimiento. Al incorporar estas técnicas en tu sistema, podrás lograr un control más preciso y preciso de tus variables de proceso.
Aquí hay cinco técnicas de control avanzadas que debes considerar implementar:
-
Control Predictivo de Modelo (MPC, por sus siglas en inglés): Esta técnica utiliza un modelo matemático del sistema para predecir el comportamiento futuro y optimizar las acciones de control en consecuencia. El MPC tiene en cuenta restricciones y objetivos para tomar decisiones que conduzcan a un rendimiento óptimo.
-
Control Adaptativo: Este enfoque ajusta los parámetros del controlador en función de la retroalimentación en tiempo real del proceso. Permite que el controlador se adapte a las condiciones de funcionamiento cambiantes o a las variaciones en la dinámica de la planta, lo que resulta en un mejor rendimiento y estabilidad.
-
Control Lógico Difuso: Los controladores de lógica difusa utilizan variables lingüísticas y reglas difusas para manejar no linealidades e incertidumbres en un sistema. Al utilizar términos lingüísticos como 'alto', 'bajo' o 'medio' en lugar de valores numéricos precisos, los controladores de lógica difusa proporcionan un control robusto incluso cuando se enfrentan a procesos complejos.
-
Control de Redes Neuronales: Las redes neuronales son capaces de aprender patrones a partir de datos y tomar predicciones o decisiones basadas en esta información aprendida. En los sistemas de control, los controladores de redes neuronales pueden adaptar su comportamiento mediante el entrenamiento con datos históricos o mediciones en tiempo real, lo que conduce a un mejor rendimiento.
-
Control Óptimo: Las técnicas de control óptimo tienen como objetivo encontrar la mejor estrategia de control posible que minimice una función objetivo específica mientras cumple con restricciones. Estos métodos utilizan algoritmos de optimización como programación lineal o programación dinámica para determinar los puntos de ajuste óptimos para tu controlador PID.
Aprovechar la automatización de procesos e integración
Para optimizar eficazmente la integración del controlador y automatizar la optimización del proceso, es necesario implementar algoritmos de control avanzados que mejoren la eficiencia de su controlador PID.
Al integrar estos algoritmos en su sistema, puede lograr un mejor control sobre diversos procesos y optimizar su rendimiento.
La automatización juega un papel crucial en este proceso, ya que permite la integración sin problemas de diferentes componentes y agiliza el sistema de control en general, lo que conduce a una mayor eficiencia y productividad.
Integración del controlador Streamline
Una forma de mejorar la eficiencia de su controlador PID es optimizando la integración del controlador. Al optimizar el proceso de integración, puede mejorar significativamente el rendimiento y la capacidad de respuesta de su controlador.
Aquí hay cinco pasos clave a considerar:
-
Optimice la afinación de los parámetros: Ajustar finamente los parámetros de su controlador PID ayudará a mejorar el tiempo de respuesta y eliminar el sobrepaso.
-
Implemente el control de retroalimentación anticipada (feedforward): Incorporar el control de retroalimentación anticipada le permite anticipar perturbaciones y compensarlas de manera proactiva, reduciendo el impacto en la salida de su sistema.
-
Utilice algoritmos avanzados: Considere la implementación de algoritmos de control más sofisticados como el control predictivo basado en modelo (MPC) o el control adaptativo para mejorar aún más el rendimiento.
-
Utilice protocolos de comunicación digital: El uso de protocolos de comunicación modernos como OPC (OLE para el control de procesos) puede agilizar el intercambio de datos entre los diferentes componentes de su sistema, mejorando la eficiencia general de la integración.
-
Aproveche el monitoreo en tiempo real y las herramientas de diagnóstico: La implementación de herramientas de monitoreo en tiempo real y diagnóstico le permite identificar problemas de manera rápida, lo que permite una solución de problemas y optimización más rápida.
Optimización de procesos automatizados
Al automatizar la optimización del proceso, puedes agilizar la eficiencia de tu sistema y mejorar su rendimiento general.
Las técnicas de optimización automatizada utilizan algoritmos y análisis de datos para mejorar la eficiencia de los procesos dentro de tu sistema. Estas técnicas involucran el uso de herramientas de software avanzadas que monitorean, analizan y optimizan continuamente diversos parámetros en tiempo real.
A través de esta automatización, puedes identificar ineficiencias o cuellos de botella que puedan estar obstaculizando el rendimiento de tu sistema. Al implementar técnicas de optimización automatizada, puedes tomar decisiones informadas de manera rápida y eficiente para abordar estos problemas.
Esto no solo conduce a la mejora de la eficiencia del proceso, sino que también ayuda a maximizar la productividad, reducir costos y garantizar una salida de calidad consistente. La automatización elimina errores humanos y proporciona un enfoque sistemático para optimizar los procesos, lo que resulta en una mejora del rendimiento general del sistema.
Monitorizar de forma continua y ajustar el rendimiento del controlador PID
Asegúrate de monitorear y ajustar continuamente el rendimiento de tu controlador PID. El monitoreo en tiempo real es esencial para garantizar un funcionamiento óptimo y eficiente de tu sistema. Al evaluar el rendimiento de tu controlador, puedes identificar desviaciones o ineficiencias y tomar medidas correctivas de manera oportuna.
Aquí hay cinco razones clave por las que el monitoreo en tiempo real y la evaluación del rendimiento deben ser una prioridad para ti:
-
Identificar oscilaciones: El monitoreo en tiempo real de tu controlador PID te permite detectar cualquier oscilación en el sistema. Estas oscilaciones podrían llevar a la inestabilidad o un control deficiente, lo cual puede afectar la eficiencia general del proceso.
-
Detectar perturbaciones: El monitoreo en tiempo real ayuda a identificar perturbaciones inesperadas que pueden afectar la respuesta del sistema. Al detectar estas perturbaciones de manera temprana, puedes ajustar los parámetros del PID de acuerdo para mantener un control estable.
-
Evaluar cambios en el punto de consigna: Cuando hay cambios en los puntos de consigna, es crucial evaluar qué tan rápido y precisamente responde el controlador PID. El monitoreo en tiempo real te permite evaluar si el controlador está cumpliendo eficientemente con los objetivos deseados.
-
Optimizar los parámetros de ajuste: La evaluación continua del rendimiento del PID te permite ajustar finamente los parámetros del controlador para un funcionamiento óptimo. Al analizar varias métricas como la sobrecompensación, el tiempo de establecimiento y el error en estado estacionario, puedes tomar decisiones informadas sobre el ajuste de las ganancias proporcional, integral y derivativa.
-
Prevenir fallas del sistema: La detección temprana de anomalías a través del monitoreo en tiempo real ayuda a prevenir fallas imprevistas en el sistema. Al mantener un control cercano de las variables críticas y garantizar su adherencia a los límites predefinidos, los riesgos potenciales se pueden mitigar de manera efectiva.
Preguntas frecuentes
¿Cómo puedo determinar los valores iniciales de las ganancias proporcional, integral y derivativa de mi controlador PID?
Para determinar los valores iniciales de las ganancias proporcionales, integrales y derivativas de tu controlador PID, debes considerar varios métodos de ajuste.
Estos métodos buscan encontrar las ganancias óptimas que mejorarán la eficiencia de tu controlador. Mediante el análisis de la dinámica del sistema, realizando pruebas de escalón o utilizando herramientas de software como los métodos de Ziegler-Nichols o Cohen-Coon, puedes recopilar datos y calcular valores de ganancia adecuados.
Esto asegura un control efectivo y mejora el rendimiento general en la regulación de la salida de tu sistema.
¿Cuáles son los desafíos comunes que se enfrentan al implementar el control de retroalimentación en un sistema PID?
Cuando se implementa el control de avance en un sistema PID, es posible que te enfrentes a algunos desafíos comunes. Estos desafíos incluyen la necesidad de modelar con precisión la dinámica de la planta, determinar la ganancia de avance adecuada y compensar las perturbaciones que no se tienen en cuenta en el modelo de avance.
A pesar de estos desafíos, hay varios beneficios al utilizar el control de avance. Puede mejorar el rechazo de perturbaciones, reducir el tiempo de establecimiento y mejorar el rendimiento general del sistema al anticipar y contrarrestar las perturbaciones antes de que afecten la variable controlada.
¿Puede proporcionar ejemplos de diferentes tipos de técnicas de anti-reset windup que se pueden utilizar en un controlador PID?
Diferentes técnicas de anti-reset windup en controladores PID pueden mejorar considerablemente el rendimiento del sistema de control.
Un método es el límite del integrador dinámico, que ajusta de manera dinámica el valor máximo de la salida del integrador para evitar la saturación.
El cálculo inverso implica estimar los cambios en las variables manipuladas causados por el integrador windup y restarlos de la salida del controlador.
La programación de ganancia ajusta las ganancias del controlador PID en función de condiciones operativas específicas.
El control de reset externo utiliza una señal externa para resetear o ajustar el término del integrador y evitar el windup.
Estas técnicas mejoran la estabilidad y precisión en los sistemas de control PID.
¿Hay alguna técnica de filtrado y suavizado específica que se utilice comúnmente para mejorar el rendimiento de un controlador PID?
Para mejorar el rendimiento de su controlador PID, existen técnicas comúnmente utilizadas de filtrado y suavizado. Estas técnicas se centran en el diseño de filtros y la reducción de ruido para garantizar una mayor precisión en el control.
¿Cómo se pueden utilizar las estrategias de control adaptativo en un sistema PID para mejorar la eficiencia?
Para mejorar la eficiencia de tu controlador PID, puedes utilizar estrategias de control adaptativo. Estas estrategias permiten al controlador ajustar sus parámetros en función de las condiciones cambiantes, optimizando el rendimiento.
Los métodos de control adaptativo se pueden utilizar en conjunto con métodos de ajuste para monitorear y actualizar continuamente los ajustes del controlador. Este enfoque dinámico asegura que el sistema PID permanezca receptivo y eficiente, adaptándose a las variaciones en la dinámica del proceso y las perturbaciones.
Conclusión
En conclusión, al implementar las técnicas mencionadas anteriormente, puedes mejorar considerablemente la eficiencia de tu controlador PID.
Comprender los fundamentos del control PID y optimizar los parámetros de ajuste son puntos de partida esenciales.
Además, incorporar control de retroalimentación, técnicas de anti-reset windup, y métodos de filtrado y suavizado puede mejorar aún más el rendimiento.
Para aplicaciones más avanzadas, se pueden utilizar el control en cascada y algoritmos avanzados.
Por último, la automatización del proceso y el monitoreo continuo permiten ajustar finamente el rendimiento del PID.
Al emplear estas estrategias, puedes lograr resultados óptimos en tu sistema de control.
Si quieres conocer otros artículos parecidos a 4 formas de mejorar la eficiencia de tu controlador PID puedes visitar la categoría Componentes.
Deja una respuesta
¡Más Contenido!