3 consejos para optimizar el rendimiento de su controlador PID
Si desea optimizar el rendimiento de su controlador PID, este artículo es para usted. Le proporcionaremos tres consejos esenciales que ayudarán a mejorar la eficiencia y precisión de su controlador.
Comprender los conceptos básicos del control PID, elegir la configuración adecuada y ajustar su controlador son pasos cruciales para lograr un rendimiento óptimo.
Al considerar las no linealidades en su sistema, implementar medidas de prevención de desbordamiento, optimizar el tiempo de muestreo y evaluar los límites de salida del controlador, podrá ajustar su controlador PID como un profesional.
- Comprender los fundamentos del control PID
- Elige la configuración correcta del controlador
- Ajusta tu controlador PID
- Considerar las no linealidades en tu sistema
- Implementar la prevención de la acumulación integral
- Abordar el ruido de medición y las perturbaciones.
- Optimizar el tiempo de muestreo
- Evaluar y ajustar los límites de salida del controlador
- Implementar medidas anti-reset windup
- Monitorear y analizar el rendimiento del controlador
-
Preguntas frecuentes
- ¿Cómo maneja el controlador PID las incertidumbres o variaciones del sistema?
- ¿Se puede utilizar el controlador PID en sistemas con dinámicas no lineales?
- ¿Cuáles son algunas fuentes comunes de ruido y perturbaciones en un sistema de control?
- ¿Cómo puedo determinar el tiempo de muestreo adecuado para mi controlador PID?
- ¿Cuáles son algunos indicadores clave de rendimiento que se pueden utilizar para evaluar la eficacia de un controlador PID?
- Conclusión
Comprender los fundamentos del control PID
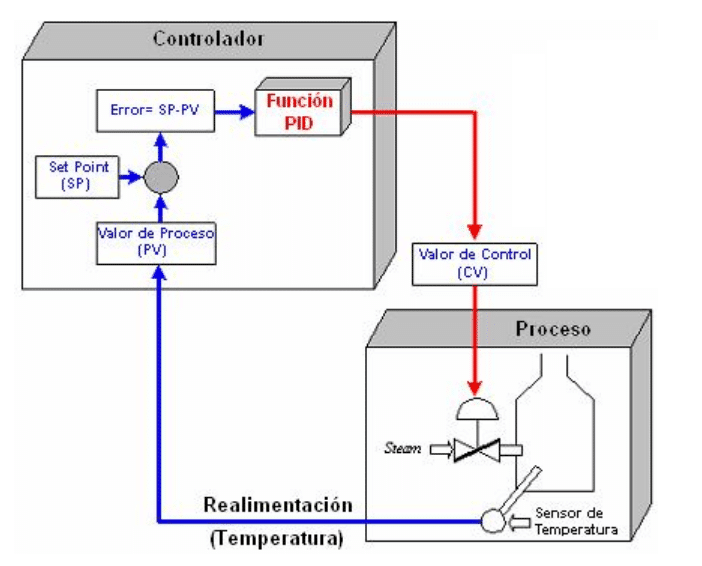
Para entender los conceptos básicos del control PID, es necesario familiarizarse con sus tres componentes principales: proporcional, integral y derivativo. Estos componentes trabajan juntos para mejorar el rendimiento de un sistema de control.
En primer lugar, vamos a hablar del componente proporcional. El término proporcional ajusta la señal de salida en función del error entre el valor deseado y el valor real del proceso. Proporciona una respuesta inmediata a los cambios en el error. Sintonizando adecuadamente este componente, se puede lograr estabilidad y reducir la sobreoscilación en el sistema.
A continuación, tenemos el componente integral. El término integral suma continuamente todos los errores pasados y aplica una corrección basada en este error acumulado a lo largo del tiempo. Esto ayuda a eliminar los errores en estado estacionario que pueden ocurrir debido a perturbaciones o inexactitudes en el sistema.
Por último, tenemos el componente derivativo. El término derivativo calcula la velocidad a la que cambia el error a lo largo del tiempo. Agrega una acción correctiva que se opone a los cambios rápidos en el error al predecir el comportamiento futuro del sistema. Esto ayuda a amortiguar cualquier oscilación o inestabilidad causada por cambios repentinos.
Las ventajas de utilizar un controlador PID incluyen su simplicidad, robustez y versatilidad para diversas aplicaciones. Su capacidad para manejar sistemas lineales y no lineales lo hace ampliamente utilizado en industrias como procesos de fabricación, robótica, sistemas de control de temperatura y sistemas de control de velocidad de motores.
Elige la configuración correcta del controlador
Asegúrese de seleccionar la configuración adecuada para su controlador para garantizar un rendimiento óptimo. El rendimiento de un controlador PID depende en gran medida de los parámetros y configuraciones elegidos. Al evaluar el rendimiento del controlador y seleccionar cuidadosamente los parámetros correctos, puede lograr un mejor control sobre su sistema.
Para empezar, es crucial evaluar el rendimiento de su controlador actual. Esto incluye analizar su respuesta a los cambios de consigna y las perturbaciones en su sistema. Al examinar métricas clave como el tiempo de subida, el tiempo de asentamiento, la sobreelongación y el error en estado estacionario, puede identificar áreas que necesitan mejorar.
Una vez que haya evaluado el rendimiento del controlador, es hora de seleccionar los parámetros adecuados. Los tres parámetros principales en un controlador PID son la ganancia proporcional (Kp), la ganancia integral (Ki) y la ganancia derivativa (Kd). Cada parámetro desempeña un papel crucial en la determinación de la respuesta del controlador.
Cuando seleccione estos parámetros, comience ajustando Kp. Auméntelo gradualmente hasta lograr una respuesta satisfactoria sin oscilaciones excesivas o inestabilidad. A continuación, pase a Ki y ajústelo para reducir los errores en estado estacionario. Por último, ajuste finamente Kd para mejorar la estabilidad y el amortiguamiento de las oscilaciones.
Es importante tener en cuenta que no hay un enfoque único cuando se trata de la selección de parámetros. Esto depende en gran medida de las características de su sistema y sus requisitos. Puede ser necesario experimentar e iterar antes de encontrar una combinación óptima de parámetros.
 Ajusta tu controlador PID
Ajusta tu controlador PID
Cuando ajustas el controlador PID, debes ajustar cuidadosamente los tres parámetros principales para lograr un control óptimo sobre tu sistema. La sintonización del controlador es un paso crítico en la optimización del rendimiento, ya que te permite ajustar la respuesta de tu controlador y garantizar una regulación efectiva de tu sistema.
El primer parámetro a considerar es la ganancia proporcional (Kp). Este parámetro determina la fuerza de la acción proporcional y afecta directamente la capacidad del controlador para responder rápidamente a los cambios en el error. Aumentar Kp mejora la capacidad de respuesta, pero puede introducir oscilaciones o inestabilidad. Por otro lado, disminuir Kp reduce la capacidad de respuesta pero puede llevar a un control lento. Encontrar el equilibrio adecuado es crucial para lograr un control estable y eficiente.
A continuación, tenemos la ganancia integral (Ki), que elimina cualquier error en estado estacionario mediante la integración continua de errores pasados. Ajustar Ki puede ayudar a mejorar la precisión general y permitir un mejor seguimiento de los puntos de ajuste. Sin embargo, establecer Ki demasiado alto puede resultar en sobrepasos o incluso inestabilidad debido a una integración excesiva de errores. Por otro lado, establecer Ki demasiado bajo puede no eliminar suficientemente los errores en estado estacionario.
Por último, tenemos la ganancia derivativa (Kd), que tiene en cuenta la rapidez con la que cambia el error con el tiempo. Al agregar un efecto de amortiguación en los cambios repentinos de error, Kd ayuda a estabilizar el control y minimizar los sobrepasos causados por cambios rápidos en los puntos de ajuste o perturbaciones. Es necesario ajustar cuidadosamente Kd, ya que aumentarlo en exceso puede llevar a un controlador demasiado sensible que responde de manera errática.
Para lograr un rendimiento óptimo con tu controlador PID, es esencial experimentar con diferentes combinaciones de estos parámetros mientras observas sus efectos en la respuesta del sistema. También es importante tener en cuenta que existen diversos métodos, como Ziegler-Nichols o Cohen-Coon, que proporcionan pautas para la estimación inicial de los parámetros basada en las características del sistema.
Considerar las no linealidades en tu sistema
Ten en cuenta cualquier no linealidad en tu sistema, ya que puede afectar el rendimiento y la estabilidad de tu controlador. La dinámica de un sistema no lineal ocurre cuando la relación entre las entradas y salidas de un sistema no es lineal. Estas no linealidades pueden introducir complejidades que deben abordarse para lograr un rendimiento de control óptimo.
Para compensar estas no linealidades, se pueden emplear diversas técnicas. Un enfoque común es utilizar técnicas de compensación como el control de avance o la programación de ganancias. El control de avance implica utilizar un modelo del sistema para anticipar perturbaciones o cambios en el punto de consigna y proporcionar una entrada adicional para contrarrestar sus efectos. Por otro lado, la programación de ganancias ajusta los parámetros del controlador en función de ciertas condiciones o puntos de operación, lo que permite una mejor adaptación a las dinámicas variables.
Es importante identificar y comprender las no linealidades específicas presentes en tu sistema antes de decidir qué técnica de compensación utilizar. Esto podría implicar analizar datos de pruebas experimentales o utilizar modelos matemáticos. Una vez que hayas identificado las fuentes de no linealidad, podrás determinar qué técnica de compensación es la más adecuada para abordarlas.
Aquí tienes un ejemplo de tabla que ilustra diferentes tipos de no linealidades y posibles técnicas de compensación:
| No linealidad | Técnica de compensación |
|---|---|
| Saturación | Anti-windup |
| Zona muerta | Compensación de fricción |
| Histéresis | Pre-filtrado |
| Juego | Pre-compensación |
Implementar la prevención de la acumulación integral
Para prevenir la acumulación integral en su sistema, es importante implementar técnicas de anti-acumulación, como la saturación o el reinicio dinámico. La acumulación integral ocurre cuando el término integrador en un controlador PID continúa acumulando errores a pesar de que la salida está saturada. Esto puede provocar sobreimpulso, inestabilidad y un mal rendimiento del sistema de control.
Para optimizar el rendimiento de su controlador PID y prevenir la acumulación integral, considere las siguientes medidas:
-
Saturación: Implementar límites de saturación en la salida de su controlador puede ayudar a prevenir la acumulación integral. Cuando la salida alcanza su valor máximo o mínimo, se bloquea la acumulación adicional de errores, limitando eficazmente el crecimiento excesivo del integrador.
-
Reinicio Dinámico: Otra técnica efectiva es implementar el reinicio dinámico. Esto implica ajustar la ganancia del integrador en función de ciertas condiciones o eventos en su sistema. Por ejemplo, podría disminuir la ganancia al acercarse al punto de consigna para evitar el sobreimpulso y luego aumentarla para obtener una respuesta más rápida durante transitorios.
-
Integración Condicional: Al habilitar o deshabilitar selectivamente la integración en función de condiciones o limitaciones específicas en su sistema, se puede evitar la acumulación integral. Por ejemplo, si existen restricciones físicas que impiden una integración precisa durante ciertos estados (por ejemplo, límites mecánicos), puede deshabilitar la integración durante esos períodos.
Al incorporar estas medidas de anti-acumulación en el diseño y ajuste de su controlador PID, puede minimizar la acumulación integral y mejorar el rendimiento general del sistema de control.
Es crucial analizar cuidadosamente su aplicación particular y la dinámica de su sistema para determinar qué métodos serán más efectivos para prevenir la acumulación integral y lograr los objetivos de control deseados. Recuerde que optimizar un controlador PID requiere una comprensión exhaustiva de los principios de control de retroalimentación y una consideración cuidadosa de los factores específicos del sistema.
Abordar el ruido de medición y las perturbaciones.
Abordar el ruido de medición y las perturbaciones es crucial para garantizar una operación precisa y estable del sistema de control. Con el fin de lograr un control preciso, es necesario reducir los efectos del ruido de medición en el sistema. El ruido de medición se refiere a variaciones no deseadas o errores en la señal medida, lo que puede llevar a una retroalimentación inexacta y resultar en un mal rendimiento del control.
Para reducir el ruido de medición, un enfoque efectivo es el filtrado. Al aplicar un filtro pasa bajo a la señal medida, el ruido de alta frecuencia puede ser atenuado mientras se preserva la información esencial necesaria para el control. Esto ayuda a obtener una señal de retroalimentación más suave y confiable, lo que conduce a una mayor precisión del control.
Otro aspecto importante de la optimización del sistema de control es el rechazo de perturbaciones. Las perturbaciones son influencias externas que pueden interrumpir el comportamiento deseado del sistema. Estas perturbaciones pueden provenir de diversas fuentes, como cambios en las condiciones de carga o factores ambientales. Para garantizar una operación estable, es necesario rechazar estas perturbaciones de manera efectiva.
Una forma de lograr el rechazo de perturbaciones es incorporar un controlador de avance en el diseño del sistema. El controlador de avance utiliza un modelo estimado de la perturbación y aplica acciones compensatorias adecuadas antes de que afecten a la variable de proceso que se está controlando. Este enfoque proactivo ayuda a minimizar el impacto de las perturbaciones en el rendimiento del sistema.
Además del control de avance, el control de retroalimentación también desempeña un papel vital en el rechazo de perturbaciones. Al monitorear continuamente la variable de proceso y ajustar la salida del controlador en consecuencia, se pueden corregir rápidamente cualquier desviación causada por perturbaciones.
Optimizar el tiempo de muestreo
Cuando se optimiza el tiempo de muestreo para su controlador PID, es crucial seleccionar cuidadosamente la frecuencia de muestreo adecuada. Esta decisión debe basarse en factores como la dinámica del sistema y las especificaciones de rendimiento deseadas.
Además, se debe considerar el impacto del intervalo de tiempo entre las muestras para garantizar acciones de control precisas y estabilidad.
Selección de frecuencia de muestreo
Elegir la frecuencia de muestreo adecuada es crucial para optimizar el rendimiento de su controlador PID. La frecuencia de muestreo determina con qué frecuencia el controlador mide y actualiza su salida.
Para ayudarlo a comprender el impacto de la frecuencia de muestreo en el rendimiento de su controlador, considere los siguientes compromisos:
-
Frecuencias de muestreo más altas permiten actualizaciones más frecuentes, lo que permite tiempos de respuesta más rápidos. Sin embargo, las frecuencias más altas también aumentan los requisitos computacionales y pueden introducir ruido en el sistema.
-
Por otro lado, las frecuencias de muestreo más bajas reducen la carga computacional pero pueden resultar en tiempos de respuesta más lentos y una precisión reducida.
Encontrar el equilibrio adecuado entre el tiempo de respuesta, la precisión y los recursos computacionales es esencial al seleccionar una frecuencia de muestreo adecuada para su controlador PID. Requiere una cuidadosa consideración basada en los requisitos específicos de su sistema de control.
Impacto del intervalo de tiempo
El impacto del intervalo de tiempo en el rendimiento de su sistema puede ser significativo. El retraso de tiempo, o la cantidad de tiempo que lleva que una señal se propague a través de su sistema, puede tener un efecto directo en el rendimiento de su sistema. Si el retraso de tiempo es demasiado largo, puede llevar a la inestabilidad y un mal rendimiento de control.
Por otro lado, si el tamaño del paso de tiempo es demasiado pequeño, puede resultar en una carga computacional innecesaria sin proporcionar ninguna mejora perceptible en el rendimiento.
Para optimizar el rendimiento de su sistema, es necesario considerar cuidadosamente el impacto del intervalo de tiempo y elegir un valor apropiado tanto para el retraso de tiempo como para el tamaño del paso de tiempo. Al comprender cómo estos parámetros afectan el comportamiento de su sistema y tomar decisiones informadas basadas en ese conocimiento, puede garantizar un rendimiento de control óptimo mientras se minimiza el esfuerzo computacional.
Es importante encontrar un equilibrio entre precisión y eficiencia al seleccionar estos valores para lograr los mejores resultados posibles.
Lograr una respuesta óptima
Para obtener los mejores resultados posibles, es importante encontrar un equilibrio entre precisión y eficiencia al seleccionar el retraso de tiempo y el tamaño del paso de tiempo adecuados para su sistema. Lograr estabilidad y mejorar la precisión del control son objetivos clave al optimizar el rendimiento de su controlador PID.
Aquí hay algunos consejos para ayudarlo a lograr una respuesta óptima:
-
Considere las características de su sistema:
-
Identifique la constante de tiempo dominante y elija un retraso de tiempo adecuado que coincida o supere esta constante.
-
Tenga en cuenta cualquier no linealidad o incertidumbre en su sistema.
-
Experimente con diferentes tamaños de paso de tiempo:
-
Pasos de tiempo más pequeños pueden mejorar la precisión pero pueden aumentar los requisitos de cálculo.
-
Pasos de tiempo más grandes pueden reducir los requisitos de cálculo pero pueden sacrificar la precisión.
-
Utilice herramientas de simulación:
-
Simule diferentes escenarios para evaluar el rendimiento de diferentes retrasos de tiempo y tamaños de paso.
Evaluar y ajustar los límites de salida del controlador
Para controlar eficazmente tu sistema, es crucial establecer límites apropiados para la salida del controlador. Esto garantiza que la salida se mantenga dentro de un rango seguro y factible, previniendo cualquier posible daño o inestabilidad.
Además, monitorear el comportamiento de la salida del controlador te permite identificar cualquier patrón inesperado o anormal. Esto te permite realizar los ajustes necesarios y optimizar el rendimiento del sistema.
Establecer límites apropiados
Asegúrese de establecer límites adecuados para su controlador PID para optimizar su rendimiento. Establecer los límites correctos es crucial para garantizar que su controlador funcione dentro de un rango seguro y eficiente.
Aquí hay algunos puntos clave a considerar al establecer estos límites:
-
Ajuste del punto de consigna: Es importante ajustar el punto de consigna de su controlador PID en función del resultado deseado. Al ajustar finamente el punto de consigna, puede lograr un mejor control sobre el sistema y mejorar el rendimiento general.
-
Ganancia del controlador: El parámetro de ganancia determina qué tan agresivamente responde el controlador a los errores. Encontrar el valor óptimo para este parámetro es esencial para lograr estabilidad y reducir las oscilaciones en el sistema.
-
Límites de salida: Para evitar sobrepasar o quedarse por debajo del valor deseado, es necesario definir límites superiores e inferiores de salida para su controlador PID. Estos límites restringirán el rango de valores de salida, asegurando que se mantengan dentro de límites aceptables.
Comportamiento de salida del monitor
Asegúrate de monitorear de cerca el comportamiento de la salida para identificar cualquier problema o desviación del control deseado en tu sistema. Analizar las fluctuaciones de la salida es crucial para optimizar el rendimiento de tu controlador PID.
Al rastrear la respuesta del sistema, puedes detectar cualquier anomalía y realizar los ajustes necesarios para garantizar un control óptimo. Es importante vigilar de cerca los valores de salida para detectar cualquier cambio repentino o inconsistencia que pueda indicar problemas con tu controlador.
Busca fluctuaciones que estén más allá de los límites aceptables e investiga sus causas de inmediato. Estas pueden ser causadas por perturbaciones, parámetros de ajuste incorrectos o incluso fallas en el hardware.
Implementar medidas anti-reset windup
El reset windup es un problema común en los sistemas de control que utilizan controladores PID (Proporcional-Integral-Derivativo). Ocurre cuando la salida del controlador no puede seguir el valor deseado debido a limitaciones en las acciones de control disponibles, como las limitaciones de saturación de la señal de entrada o las restricciones físicas del sistema.
Para evitar el reset windup, se pueden implementar medidas anti-reset windup. Estas son algunas de las medidas que se pueden tomar:
- Restricción de acción integral: Limitar la acción integral del controlador cuando la salida alcanza los límites de saturación. Esto evita que
Para evitar que el controlador PID experimente la acumulación de error durante el rebote, debes implementar medidas contra el rebote de cero. El rebote de cero ocurre cuando el término integral de un controlador PID continúa acumulando error incluso cuando el actuador está en sus límites. Esto puede provocar sobrepaso e inestabilidad en el sistema.
Implementar medidas contra el rebote de cero puede ayudar a mitigar este problema y mejorar el rendimiento de tu controlador PID.
Aquí hay tres medidas importantes para implementar:
-
Limitar la acumulación de error integral: Al establecer un límite en cuánto puede acumularse el término integral durante períodos de saturación, puedes prevenir el rebote de cero. Esto se puede hacer mediante la limitación o saturación de la salida del integrador cada vez que excede un umbral determinado. Esto asegura que no ocurra una acumulación excesiva de error durante la saturación del actuador.
-
Implementar control de avance: Incorporar control de avance en tu sistema también puede ayudar a reducir el rebote de cero. El control de avance utiliza un modelo o estimación de la dinámica de la planta para calcular una señal de control adicional que anticipa los cambios en los puntos de ajuste o las perturbaciones. Al incluir este componente, puedes reducir la dependencia del control de retroalimentación solo, minimizando así los errores que contribuyen al rebote de cero.
-
Analizar la estabilidad del controlador: Es esencial analizar las características de estabilidad de tu controlador PID con las medidas contra el rebote de cero implementadas. El análisis de estabilidad ayuda a garantizar que tu sistema no presente oscilaciones u otros comportamientos indeseables cuando se somete a diferentes entradas y perturbaciones. Técnicas como el análisis del lugar de las raíces o el análisis de respuesta en frecuencia se pueden utilizar para este propósito.
Monitorear y analizar el rendimiento del controlador
Cuando se monitorea y analiza el rendimiento del controlador, es importante evaluar su estabilidad y capacidad de respuesta bajo diversas condiciones de funcionamiento. Al analizar el rendimiento del controlador, se pueden identificar áreas que requieren mejoras y realizar ajustes correspondientes para mejorar el rendimiento general del sistema.
Para analizar el rendimiento del controlador, comience evaluando su estabilidad. La estabilidad se refiere a la capacidad del controlador para mantener el punto de ajuste deseado sin oscilaciones excesivas o inestabilidad. Se puede evaluar la estabilidad observando la respuesta del sistema cuando se somete a un cambio abrupto en la entrada. Si hay sobreimpulsos significativos u oscilaciones antes de estabilizarse en el punto de ajuste deseado, esto indica una mala estabilidad.
A continuación, enfoque en evaluar la capacidad de respuesta de su controlador. La capacidad de respuesta se refiere a cuán rápidamente y con precisión responde el controlador a los cambios en la entrada o a las perturbaciones. Un controlador con capacidad de respuesta debe poder rastrear rápidamente los cambios en los puntos de ajuste o rechazar las perturbaciones sin retrasos o errores significativos.
Para mejorar la respuesta del controlador, considere ajustar los parámetros PID en función de los requisitos específicos de su sistema. Los parámetros PID adecuadamente ajustados pueden ayudar a optimizar la respuesta del control mediante el equilibrio entre estabilidad y capacidad de respuesta.
Además, analice los datos de bucles de retroalimentación en tiempo real utilizando herramientas como modelos matemáticos o software de simulación. Estas herramientas le permiten evaluar diferentes escenarios y probar varias estrategias de control antes de implementarlas en sistemas reales.
Preguntas frecuentes
¿Cómo maneja el controlador PID las incertidumbres o variaciones del sistema?
El controlador PID está diseñado para manejar incertidumbres y variaciones del sistema mediante la adaptación de su estrategia de control. Logra esto monitoreando continuamente el error entre el valor de consigna deseado y la variable del proceso real. Con base en este error, el controlador ajusta su señal de salida para minimizar la desviación respecto al valor de consigna.
¿Se puede utilizar el controlador PID en sistemas con dinámicas no lineales?
Sí, el controlador PID se puede utilizar en sistemas con dinámicas no lineales. Sin embargo, es importante tener en cuenta que el controlador PID tiene limitaciones cuando se trata de no linealidades. En tales casos, pueden ser necesarias estrategias de control alternativas para lograr un mejor rendimiento.
Estas estrategias podrían incluir técnicas de control basadas en modelos o algoritmos avanzados de control no lineal, como el control adaptativo o el control lógico difuso. Estos métodos pueden ayudar a superar las limitaciones del controlador PID y mejorar el rendimiento del sistema en sistemas dinámicos no lineales.
¿Cuáles son algunas fuentes comunes de ruido y perturbaciones en un sistema de control?
Para optimizar el rendimiento de tu controlador PID, es importante abordar las fuentes comunes de ruido en la medición y perturbaciones en un sistema de control. Estos factores pueden afectar significativamente la precisión y estabilidad de la salida de tu controlador.
Técnicas como el filtrado de señales, la calibración de sensores y la implementación de mecanismos de retroalimentación pueden ayudar a reducir el ruido en las mediciones y las perturbaciones. Comprender y minimizar estos problemas conducirá a una mejor actuación del sistema de control y a salidas de control más precisas de tu controlador PID.
¿Cómo puedo determinar el tiempo de muestreo adecuado para mi controlador PID?
Para determinar el tiempo de muestreo adecuado para su controlador PID, es necesario considerar dos factores principales: la dinámica de su sistema y los parámetros de ajuste de su controlador.
El tiempo de muestreo debe ser elegido de tal manera que capture las dinámicas importantes de su sistema, al mismo tiempo que permita una respuesta rápida de su controlador.
Es crucial encontrar un equilibrio entre capturar medidas precisas y minimizar el retardo de control.
La experimentación y el análisis son clave para encontrar el tiempo de muestreo óptimo para su aplicación específica.
¿Cuáles son algunos indicadores clave de rendimiento que se pueden utilizar para evaluar la eficacia de un controlador PID?
Para evaluar la efectividad de tu controlador PID, hay métricas e indicadores clave de desempeño a considerar.
Estos incluyen:
-
Error en estado estacionario: Esto mide qué tan cerca está la salida del valor deseado en una condición estable.
-
Sobrepaso: Esto indica si el sistema excede el valor deseado antes de estabilizarse.
-
Tiempo de asentamiento: Esto mide cuánto tiempo tarda el sistema en alcanzar un estado estable sin oscilar.
-
Tiempo de respuesta: Esto determina qué tan rápido el sistema alcanza su valor final desde un estado inicial.
Conclusión
En conclusión, optimizar el rendimiento de tu controlador PID es crucial para lograr un control preciso y eficiente en varios sistemas. Al entender los conceptos básicos del control PID y elegir la configuración correcta del controlador, puedes ajustar tu sistema para cumplir con requisitos específicos.
Considerar las no linealidades, implementar medidas de prevención de desbordamiento, optimizar el tiempo de muestreo y monitorear el rendimiento del controlador son pasos esenciales para mejorar su efectividad general.
Teniendo en cuenta estos consejos, puedes mejorar el rendimiento de tu controlador PID y lograr mejores resultados de control.
Si quieres conocer otros artículos parecidos a 3 consejos para optimizar el rendimiento de su controlador PID puedes visitar la categoría Componentes.
Deja una respuesta
¡Más Contenido!