5 Claves para entender el funcionamiento de un controlador PID
Si alguna vez te has preguntado cómo opera un controlador PID, has llegado al lugar correcto. En este artículo, exploraremos las cinco claves para entender su funcionamiento.
Desglosaremos los componentes clave de un controlador PID y nos adentraremos en los conceptos de control proporcional, integral y derivativo.
También descubrirás las mejores prácticas para ajustar un controlador PID y aprenderás técnicas para abordar la sobrepasada y el tiempo de estabilización.
Así que sumerjámonos y desentrañemos los misterios detrás de este mecanismo de control esencial.
- Componentes clave de un controlador PID
- Comprensión del Control Proporcional
- Explorando el Control Integral
- Desentrañando el Control Derivativo
- Ajuste de un controlador PID: Mejores prácticas
- El papel del punto de consigna y la variable de proceso
- Abordando el exceso y el tiempo de asentamiento
- Técnicas anti-saturación para controladores PID
- Implementando Control PID en Diferentes Industrias
- Solución de problemas de problemas comunes con controladores PID
-
Preguntas frecuentes
- ¿Se puede utilizar un controlador PID en industrias distintas a la manufactura y el control de procesos?
- ¿Cómo puedo determinar los valores apropiados para las constantes proporcional, integral y derivativa en un controlador PID?
- ¿Cuáles son algunos problemas comunes que pueden surgir al implementar un controlador PID y cómo pueden solucionarse?
- ¿Se puede usar un controlador PID para sistemas no lineales o sistemas con parámetros variables en el tiempo?
- ¿Existen estrategias de control alternativas que se puedan utilizar junto con o en lugar de un controlador PID?
- Conclusión
Componentes clave de un controlador PID
Necesitas entender los componentes clave de un controlador PID. El diseño y la aplicación de un controlador PID son cruciales en varios sistemas de control.
Un controlador PID, abreviatura de controlador Proporcional-Integral-Derivativo, es un sistema de control de retroalimentación que calcula continuamente una señal de error para ajustar la salida basada en tres componentes principales: ganancia proporcional, ganancia integral y ganancia derivativa.
El componente de ganancia proporcional (KP) en un controlador PID es directamente proporcional a la señal de error. Determina cuán agresivamente responde el sistema a los cambios en el error. Un valor KP más alto resulta en una respuesta más rápida, pero también puede provocar sobrepaso o inestabilidad.
El componente de ganancia integral (KI) integra la señal de error a lo largo del tiempo, ayudando a eliminar errores en estado estacionario causados por perturbaciones o sesgos constantes. KI actúa como un factor de corrección que acerca gradualmente el sistema a su punto de ajuste deseado. Sin embargo, valores excesivos de KI pueden causar oscilaciones e inestabilidad.
El componente de ganancia derivativa (KD) utiliza la tasa de cambio de la señal de error para predecir el comportamiento futuro y amortiguar cualquier cambio repentino. KD ayuda a estabilizar el sistema reduciendo el sobrepaso y mejorando el tiempo de respuesta. Sin embargo, un exceso de KD puede aumentar la sensibilidad al ruido.
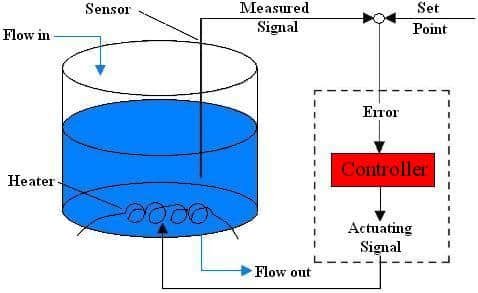
Los controladores PID encuentran aplicaciones en diversas industrias como sistemas de control de temperatura, robótica, procesos químicos y control de velocidad de motores. En los sistemas de control de temperatura, los controladores PID regulan con precisión los elementos de calefacción o enfriamiento basados en las temperaturas medidas y los puntos de ajuste deseados. En robótica, los controladores PID ayudan a mantener la estabilidad durante el movimiento mediante el ajuste de las velocidades de los motores en función de los errores de posición.
Comprensión del Control Proporcional
El control proporcional es una técnica utilizada en la ingeniería y la automatización para mantener un sistema en un estado deseado. En este tipo de control, la salida del sistema se ajusta en proporción a la diferencia entre el valor deseado y el valor real.
La idea detrás del control proporcional es que a medida que la diferencia entre el valor deseado y el valor real aumenta, la salida del sistema también aumenta proporcionalmente. Esto ayuda a corregir el error y acercar el sistema al estado deseado.
El control proporcional se basa en un parámetro llamado ganancia proporcional. Esta
En esta discusión, obtendrás una comprensión integral de los conceptos básicos del control proporcional. Explorarás cómo funciona el control proporcional y los principios clave detrás de él.
Además, aprenderás sobre los beneficios que ofrece el control proporcional en diversas aplicaciones e industrias.
Fundamentos del Control Proporcional
Comienza por comprender los conceptos básicos del control proporcional en un controlador PID. El control proporcional es uno de los tres componentes que conforman un controlador PID, que significa Proporcional-Integral-Derivativo. Este método de control se utiliza ampliamente en diversas industrias para regular procesos y sistemas. La acción de control proporcional es directamente proporcional al error entre el valor de consigna deseado y la variable de proceso actual.
Sin embargo, es importante tener en cuenta que el control proporcional tiene sus limitaciones. Una limitación es que no puede eliminar completamente los errores en estado estacionario, ya que solo proporciona una acción correctiva basada en el valor de error presente. Además, si el factor de ganancia se establece demasiado alto, puede provocar inestabilidad y oscilaciones en el sistema.
Para comprender completamente cómo opera el control proporcional dentro de un lazo de control, es fundamental tener un sólido dominio de cómo funciona en su conjunto el lazo mismo. El lazo de control consta de cuatro elementos principales: un sensor o transductor, que mide la variable de proceso; un controlador que calcula y aplica acciones correctivas apropiadas; un actuador o elemento de control final que lleva a cabo estas acciones; y finalmente, el propio proceso.
Beneficios del Control Proporcional
Uno de los beneficios del control proporcional es que proporciona una acción correctiva basada en el valor de error presente. Esto significa que el controlador responde a cualquier desviación del punto de ajuste deseado ajustando la salida de control de manera proporcional.
Aquí hay cinco ventajas clave de utilizar el control proporcional en su sistema:
-
Mejora de la precisión del control: El control proporcional ayuda a reducir los errores en estado estacionario y acerca la variable controlada a su punto de ajuste.
-
Optimización de la respuesta del sistema: Al proporcionar una acción correctiva inmediata, el control proporcional permite tiempos de respuesta más rápidos y una rápida estabilización del sistema.
-
Implementación sencilla: El control proporcional es relativamente fácil de implementar y no requiere cálculos complejos ni ajustes intrincados.
-
Compatibilidad con otros métodos de control: Se puede combinar con otros métodos de control como el control integral y derivativo para crear un sistema más robusto y eficiente.
-
Mejora de la estabilidad: Cuando se ajusta adecuadamente, el control proporcional puede mejorar la estabilidad amortiguando las oscilaciones y reduciendo la sobreimpulsión.
 Explorando el Control Integral
Explorando el Control Integral
Para comprender mejor el control integral, necesitarás entender su impacto en el rendimiento general de un controlador PID. El control integral es un componente esencial de un controlador PID que ayuda a regular el error en estado estacionario de un sistema. Funciona sumando continuamente el error entre el punto de ajuste deseado y la salida real a lo largo del tiempo, integrándolo en los cálculos del controlador.
Un aspecto clave del control integral es abordar posibles problemas de sobrepaso. El sobrepaso ocurre cuando el integrador acumula demasiado error debido a limitaciones en el movimiento o la saturación del actuador. Esto puede llevar a sobrepasar y a la inestabilidad del sistema. Se emplean técnicas de anti-sobrepaso para mitigar estos problemas.
Las técnicas de anti-sobrepaso implican modificar el término integral según ciertas condiciones. Un enfoque común es el bloqueo, que limita la salida del integrador dentro de un rango predefinido para evitar la saturación o valores no aceptables. Otro método es el cálculo inverso, donde se resta una estimación de cuánto sobrepaso ocurrió durante la saturación del error acumulado antes de integrarlo más.
Optimizar el control integral implica ajustar su parámetro de ganancia para lograr un rendimiento del sistema deseable. Una ganancia demasiado baja puede resultar en tiempos de respuesta lentos y errores en estado estacionario excesivos, mientras que una ganancia demasiado alta puede causar sobrepasos y oscilaciones. Encontrar un equilibrio óptimo requiere analizar cuidadosamente la dinámica del sistema y utilizar métodos como Ziegler-Nichols o enfoques de prueba y error.
Desentrañando el Control Derivativo
Para desentrañar el control derivativo, deberás comprender su papel en la mejora de la estabilidad y capacidad de respuesta de un sistema. La acción derivativa es un componente importante del controlador PID que ayuda a optimizar el proceso de control. Aquí hay cinco puntos clave a considerar al explorar la acción derivativa:
-
Comprender la tasa de cambio: El control derivativo tiene en cuenta la tasa a la cual cambia el error a lo largo del tiempo. Al medir esta tasa, proporciona información valiosa sobre qué tan rápido responde el sistema a los cambios.
-
Mejorar la estabilidad: Una de las funciones principales del control derivativo es mejorar la estabilidad del sistema al amortiguar las oscilaciones o sobrepasos causados por perturbaciones repentinas. Esto se logra anticipando los cambios futuros y ajustando la señal de control en consecuencia.
-
Reducir el tiempo de estabilización: Al predecir los cambios futuros en el error, la acción derivativa permite tiempos de respuesta más rápidos, lo que resulta en un tiempo de estabilización reducido. Esto significa que el sistema puede alcanzar su punto de ajuste deseado de manera más rápida y eficiente.
-
Suprimir el ruido: La acción derivativa también puede ayudar a filtrar el ruido o fluctuaciones no deseadas en la señal de medición. Esto se logra reaccionando solo a cambios significativos en el error en lugar de variaciones menores, lo que conduce a un control más suave y preciso.
-
Optimizar los parámetros de control: Para lograr un rendimiento óptimo, es crucial ajustar cuidadosamente la ganancia derivativa. Un valor demasiado alto puede provocar inestabilidad o una respuesta excesiva, mientras que un valor demasiado bajo puede resultar en lentitud o un rechazo deficiente de perturbaciones.
Explorar la acción derivativa es esencial para comprender su contribución al rendimiento general del control. Al optimizar los parámetros de control derivativo, puedes mejorar la estabilidad, reducir el tiempo de estabilización, suprimir eficazmente el ruido y, en última instancia, lograr un mejor control sobre tu sistema.
Ajuste de un controlador PID: Mejores prácticas
Ahora que tienes una comprensión clara de cómo funciona el control derivativo en un controlador PID, pasemos al siguiente tema importante: ajustar el controlador PID. Ajustar se refiere al proceso de encontrar los valores óptimos para los tres parámetros de un controlador PID - Proporcional (P), Integral (I) y Derivativo (D) - con el fin de lograr el rendimiento deseado del sistema.
Ajustar un controlador PID puede ser una tarea compleja, ya que implica encontrar el equilibrio adecuado entre la capacidad de respuesta y la estabilidad. Hay varios métodos de ajuste y técnicas de optimización disponibles que pueden ayudarte a lograr este equilibrio. Estos métodos incluyen:
-
Ajuste manual: Este es un método de prueba y error donde ajustas manualmente los valores de P, I y D hasta alcanzar un rendimiento satisfactorio. Si bien este método es sencillo, puede llevar tiempo y requerir experiencia.
-
Método de Ziegler-Nichols: Este método popular utiliza datos de respuesta escalón para determinar los valores iniciales de P, I y D basados en fórmulas específicas. Proporciona puntos de partida buenos para el ajuste, pero no siempre resulta en un rendimiento óptimo.
-
Algoritmos de autoajuste: Muchos controladores modernos vienen con algoritmos de autoajuste incorporados que ajustan automáticamente los valores de P, I y D en función del comportamiento del sistema. Estos algoritmos utilizan diferentes técnicas como retroalimentación de relé o identificación basada en modelos para encontrar los parámetros óptimos.
-
Técnicas de optimización: También se pueden utilizar técnicas avanzadas de optimización como algoritmos genéticos o optimización por enjambre de partículas para encontrar los parámetros PID óptimos mediante la búsqueda iterativa en el espacio de parámetros para obtener los mejores resultados.
Al utilizar estos métodos de ajuste y técnicas de optimización, puedes asegurarte de que tu controlador PID esté ajustado correctamente para las necesidades específicas de tu aplicación, lo que resultará en un mejor rendimiento del sistema y estabilidad.
El papel del punto de consigna y la variable de proceso
Cuando se establece el punto de consigna y se supervisa la variable del proceso, es necesario asegurarse de que estén alineados para un rendimiento óptimo. La relación entre el punto de consigna y la variable del proceso es crucial en el control PID. Aquí hay cinco puntos clave para comprender la importancia del punto de consigna y la variable del proceso en el control PID:
-
Punto de consigna: El punto de consigna es el valor deseado o objetivo que desea que su sistema alcance. Representa la condición de operación ideal para su proceso.
-
Variable del proceso: La variable del proceso es el valor medido actual de su sistema en cualquier momento dado. Indica qué tan bien está funcionando su sistema en comparación con el punto de consigna.
-
Señal de error: La diferencia entre el punto de consigna y la variable del proceso se conoce como señal de error. Esta señal impulsa ajustes en la acción de control para acercarlos más.
-
Bucle de retroalimentación: Al comparar continuamente la variable del proceso con el punto de consigna, se establece un bucle de retroalimentación. Este bucle permite ajustes en tiempo real para mantener la estabilidad y precisión del sistema.
-
Acción de control: Basándose en esta retroalimentación, un controlador PID calcula y aplica acciones de control apropiadas (proporcional, integral, derivativo) para minimizar las desviaciones del punto de consigna.
Comprender estos conceptos le permite ajustar eficazmente su controlador PID para un rendimiento óptimo. Alinear su punto de consigna con una representación precisa de la variable del proceso garantiza un control preciso sobre el comportamiento de su sistema.
Abordando el exceso y el tiempo de asentamiento
Para abordar la sobrepasada y lograr un tiempo de estabilización más rápido, es necesario centrarse en minimizar la sobrepasada a través del ajuste. Al ajustar los parámetros del controlador PID, como las ganancias proporcionales, integrales y derivativas, se puede reducir eficazmente la sobrepasada sin comprometer la estabilidad.
Además, es importante encontrar el equilibrio adecuado entre estabilidad y rendimiento optimizando el tiempo de respuesta del controlador mientras se mantiene un sistema estable.
Minimizando el sobrepaso a través de la sintonización
Para minimizar el sobreimpulso, es importante ajustar correctamente el controlador PID. Esto implica ajustar las ganancias proporcional, integral y derivativa para lograr un rendimiento óptimo. Aquí hay cinco pasos clave a considerar:
-
Comienza estableciendo la ganancia proporcional (Kp) en un valor bajo y observa la respuesta del sistema.
-
Aumenta gradualmente el Kp hasta alcanzar un buen equilibrio entre una respuesta rápida y un sobreimpulso mínimo.
-
A continuación, ajusta la ganancia integral (Ki) para eliminar el error en estado estable y mejorar la estabilidad.
-
Finalmente, ajusta finamente la ganancia derivativa (Kd) para amortiguar cualquier oscilación causada por cambios rápidos en la entrada.
Siguiendo estos pasos, puedes optimizar el tiempo de respuesta de tu controlador PID mientras minimizas el sobreimpulso.
Recuerda que el ajuste a menudo es un proceso iterativo que requiere una observación y ajuste cuidadosos.
Lograr un tiempo de asentamiento más rápido
Puede lograr un tiempo de estabilización más rápido ajustando los valores de ganancia de su controlador PID. Mejorar el rendimiento del control y optimizar el tiempo de respuesta son esenciales para lograr un control preciso y eficiente en diversos sistemas.
El tiempo de estabilización se refiere al tiempo que tarda la salida del sistema en alcanzar y mantenerse dentro de un rango especificado después de una perturbación o cambio en el punto de consigna. Al ajustar las ganancias proporcional, integral y derivativa de su controlador PID, puede minimizar la sobreoscilación y reducir el tiempo de estabilización.
Un valor proporcional más alto resultará en una respuesta inicial más rápida pero puede producir sobreoscilación. Por otro lado, aumentar la ganancia integral reduce el error en estado estacionario pero puede causar mayores oscilaciones. Por último, ajustar la ganancia derivativa ayuda a amortiguar las oscilaciones pero puede introducir amplificación de ruido si se establece demasiado alto.
El ajuste fino de estas ganancias le permite encontrar un equilibrio entre la estabilidad y el rendimiento, lo que finalmente conduce a una respuesta de control mejorada con tiempos de estabilización más rápidos.
Equilibrando Estabilidad y Rendimiento
Encontrar el equilibrio adecuado entre estabilidad y rendimiento es crucial al optimizar los sistemas de control. Al entender cómo equilibrar estos factores, puedes asegurarte de que tu bucle de control funcione de manera eficiente y efectiva.
Aquí hay cinco consideraciones clave a tener en cuenta:
-
Ajustar los parámetros del controlador: Ajustar los valores proporcionales, integrales y derivativos de tu controlador PID puede ayudar a lograr el equilibrio deseado entre estabilidad y rendimiento.
-
Analizar la dinámica del sistema: Comprender el comportamiento de tu sistema controlado te permitirá tomar decisiones informadas sobre el nivel apropiado de rendimiento y estabilidad requeridos.
-
Evaluar métricas de rendimiento: Utilizar métricas como tiempo de respuesta, tiempo de asentamiento, sobreimpulso y error en estado estacionario puede brindar información sobre si tu sistema de control está cumpliendo sus objetivos.
-
Implementar técnicas de control avanzadas: Técnicas como control por retroalimentación anticipada o control predictivo basado en modelos pueden mejorar tanto la estabilidad como el rendimiento al incorporar información adicional sobre la dinámica del proceso.
-
Considerar compensaciones: Es importante reconocer que puede haber compensaciones entre estabilidad y rendimiento. Encontrar una solución óptima a menudo implica hacer compromisos basados en requisitos específicos de la aplicación.
Técnicas anti-saturación para controladores PID
Una técnica importante para los controladores PID es implementar el anti-windup para prevenir la saturación. Al utilizar un controlador PID, es esencial ser consciente de sus limitaciones. Si bien el controlador está diseñado para proporcionar un control preciso y mantener la estabilidad, puede experimentar problemas cuando se enfrenta a ciertos escenarios.
Los controladores PID operan ajustando continuamente la señal de control en función del error entre el punto de ajuste y la variable del proceso. Sin embargo, si la salida del controlador excede los límites del actuador o del sistema, puede producirse una saturación. Esto significa que, aunque pueda ser necesario realizar ajustes adicionales para alcanzar el punto de ajuste deseado, el controlador no podrá realizar cambios más allá de estos límites debido a restricciones físicas.
Para superar esta limitación y prevenir la saturación, se emplean técnicas de anti-windup. Estas técnicas tienen como objetivo limitar o eliminar los efectos indeseables causados por la saturación. Un enfoque común es conocido como prevención de integrador en saturación. Al modificar cómo el término integral acumula el error durante los períodos de saturación, esta técnica asegura que cuando se produce la saturación, no ocurra un integrador en saturación.
Existen varios métodos para implementar el anti-windup en los controladores PID. Un método implica limitar la salida del integrador cuando se produce la saturación. Otro enfoque utiliza técnicas de retro-cálculo que estiman qué parte de la señal de control se habría aplicado durante la saturación y la resta de cálculos posteriores.
En general, comprender e implementar técnicas de anti-windup en los controladores PID es crucial para mantener la estabilidad y el rendimiento en los sistemas de control, al tiempo que se previenen los efectos no deseados causados por las limitaciones del actuador o del sistema.
Implementando Control PID en Diferentes Industrias
Al implementar el control PID en diferentes industrias, te enfrentarás a desafíos específicos de la industria que requieren una consideración cuidadosa. Estos desafíos pueden incluir el manejo de no linealidades, dinámicas de proceso variables y la necesidad de optimizar el rendimiento del control manteniendo la estabilidad.
Sin embargo, los beneficios de una implementación exitosa del PID son significativos. Incluyen una mayor precisión de control, una reducción en la variabilidad de las salidas del proceso y un aumento en la productividad.
Para lograr una integración exitosa del control PID, es crucial ajustar cuidadosamente los parámetros del controlador en base a una comprensión exhaustiva de la dinámica del sistema. También es importante monitorear y ajustar continuamente según sea necesario.
Desafíos específicos de los PID en la industria
Para navegar de manera efectiva por los desafíos específicos de su industria al trabajar con un controlador PID, es importante comprender los desafíos de implementación específicos de la industria y cómo optimizar el control PID para procesos especializados. Aquí hay cinco puntos clave a tener en cuenta:
-
Variaciones en la dinámica del proceso: Diferentes industrias tienen dinámicas de proceso únicas que afectan cómo se debe ajustar un controlador PID. Comprender estas variaciones es crucial para lograr un control óptimo.
-
No linealidades y perturbaciones: Las industrias a menudo enfrentan no linealidades y perturbaciones que pueden afectar el rendimiento del sistema. Saber cómo mitigar sus efectos utilizando técnicas avanzadas de control es esencial.
-
Retardos de tiempo: Ciertas industrias experimentan retardos de tiempo en sus procesos, lo que puede complicar el control. Incorporar estrategias apropiadas como el control por retroalimentación o el control predictivo basado en modelos puede ayudar a abordar este desafío.
-
Limitaciones de los sensores: Los sensores específicos de la industria pueden tener limitaciones o tiempos de respuesta que deben tenerse en cuenta al diseñar el controlador PID.
-
Consideraciones de seguridad: Algunas industrias operan en entornos peligrosos donde la seguridad es primordial. Implementar sistemas redundantes o mecanismos de seguridad dentro del controlador PID puede garantizar operaciones seguras.
Beneficios de la Implementación de PID
La implementación del Control Proporcional-Integral-Derivativo (PID, por sus siglas en inglés) ofrece numerosos beneficios en diferentes áreas. A continuación se enumeran algunos de los principales beneficios:
-
Mejora del rendimiento del sistema: El PID es ampliamente utilizado en sistemas de control automático debido a su capacidad para mejorar el rendimiento del sistema. El PID ajusta automáticamente los parámetros de control en función de las condiciones del proceso, lo que permite un control más preciso y una respuesta más rápida.
-
Estabilidad del sistema: El PID ayuda a mantener la estabilidad del sistema controlando y ajustando continuamente los
Maximiza la eficiencia y estabilidad de los procesos de tu industria mediante la implementación de un controlador PID. Este controlador puede proporcionar un control preciso y mejorar el rendimiento general del sistema. Las aplicaciones del controlador PID son amplias, desde el control de temperatura en plantas químicas hasta el control de velocidad en motores.
Las ventajas del control PID radican en su capacidad para adaptarse a los cambios y mantener condiciones operativas óptimas. Con un algoritmo proporcional-integral-derivativo (PID), puedes lograr un control preciso ajustando la salida en función del error entre el punto de ajuste deseado y el valor actual.
El término proporcional garantiza una respuesta inmediata a los cambios, mientras que el término integral elimina los errores en estado estacionario con el tiempo. Además, el término derivativo anticipa las tendencias futuras y minimiza los sobrepasamientos o subestimaciones.
En general, la implementación de un controlador PID puede optimizar los procesos de tu industria y mejorar la productividad. Proporciona un control preciso con una mayor estabilidad.
Integración exitosa de PID
Ahora que comprendes los beneficios de implementar un controlador PID, centrémonos en cómo integrar y optimizar con éxito su rendimiento. Para lograr esto, hay varios factores clave a considerar:
-
Ajuste del PID: Ajustar adecuadamente los parámetros del controlador PID es crucial para lograr un control óptimo. Esto implica ajustar las ganancias proporcionales, integrales y derivativas para que coincidan con la dinámica de tu sistema.
-
Identificación del sistema: Comprender la dinámica de tu sistema es esencial para un ajuste exitoso del PID. Al realizar técnicas de identificación del sistema, como el análisis de la respuesta a un escalón o el análisis de la respuesta en frecuencia, puedes obtener información valiosa sobre el comportamiento de tu sistema.
-
Filtrado de ruido: Implementar técnicas adecuadas de filtrado de ruido puede ayudar a eliminar perturbaciones no deseadas en tu bucle de control, mejorando la estabilidad y precisión.
-
Mecanismos de anti-windup: Incorporar mecanismos de anti-windup en tu controlador PID puede evitar problemas de acumulación del integrador cuando se opera fuera de las condiciones normales.
-
Técnicas de control adaptativo: Utilizar técnicas de control adaptativo con controladores PID puede mejorar el rendimiento al ajustar automáticamente los parámetros del controlador en función de los cambios en la dinámica del proceso.
Solución de problemas de problemas comunes con controladores PID
Un problema común con los controladores PID es que pueden experimentar oscilaciones en la salida del sistema. Esto puede ser frustrante y perjudicial para el rendimiento general del controlador. Sin embargo, existen varias técnicas de solución de problemas para los controladores PID que pueden ayudar a identificar y resolver estos problemas.
Una técnica consiste en ajustar la ganancia proporcional (Kp) del controlador. Si notas que la salida del sistema oscila demasiado, aumentar el valor de Kp puede ayudar a estabilizar la respuesta. Por otro lado, si la salida no responde lo suficientemente rápido o muestra poca o ninguna oscilación, puede ser necesario disminuir Kp.
Otra técnica implica ajustar la ganancia integral (Ki). Si encuentras que tu sistema tiene un error en estado estacionario o tarda mucho tiempo en alcanzar su punto de consigna, aumentar Ki puede ayudar a eliminar este error y acelerar los tiempos de respuesta. Por el contrario, si notas sobreimpulso o inestabilidad en la respuesta de tu sistema, puede ser beneficioso disminuir Ki.
Por último, ajustar la ganancia derivativa (Kd) también puede ayudar en la solución de problemas de los controladores PID. Aumentar Kd puede ayudar a amortiguar las oscilaciones y mejorar la estabilidad en sistemas con entradas de rápida variación. Por el contrario, si observas una amplificación excesiva de ruido o respuestas lentas en la salida de tu sistema, puede ser necesario disminuir Kd.
Preguntas frecuentes
¿Se puede utilizar un controlador PID en industrias distintas a la manufactura y el control de procesos?
Un controlador PID puede ser utilizado en industrias distintas a la manufactura y el control de procesos. Sus aplicaciones en industrias no manufactureras incluyen sistemas HVAC, robótica y sistemas de control automotriz.
Las ventajas de utilizar controladores PID en diferentes industrias son su simplicidad, rentabilidad y capacidad para proporcionar un control preciso. Sin embargo, también existen desventajas como la necesidad de ajuste manual y limitaciones en el manejo de procesos no lineales.
Comprender estos factores es crucial al considerar la implementación de controladores PID en diversas industrias.
¿Cómo puedo determinar los valores apropiados para las constantes proporcional, integral y derivativa en un controlador PID?
Para determinar los valores apropiados de las constantes proporcional, integral y derivativa en un controlador PID, puedes utilizar varios métodos de ajuste.
Uno de los métodos comúnmente utilizados es el análisis de respuesta al escalón. Al analizar la respuesta del sistema a una entrada escalón, puedes observar su comportamiento y realizar ajustes para lograr el rendimiento deseado.
El ajuste implica encontrar el equilibrio adecuado entre la capacidad de respuesta y la estabilidad. Diferentes sistemas pueden requerir enfoques de ajuste diferentes para optimizar los parámetros de control de manera efectiva.
¿Cuáles son algunos problemas comunes que pueden surgir al implementar un controlador PID y cómo pueden solucionarse?
Al implementar un controlador PID, pueden surgir varios problemas comunes que requieren solución. A continuación, se presentan algunos de los problemas más comunes y las posibles soluciones:
- Oscilación: Si el sistema controlado oscila continuamente en lugar de estabilizarse, puede ser debido a un ajuste inadecuado de los parámetros del controlador. Para solucionarlo, se recomienda ajustar los valores de ganancia proporcional (Kp), ganancia integral (Ki) y ganancia derivativa (Kd)
Al implementar un controlador PID, es posible que te encuentres con problemas comunes que requieran solución de problemas. Estos problemas pueden incluir oscilaciones, sobreimpulsos y tiempos de respuesta lentos.
Para solucionar estos problemas, debes ajustar las constantes proporcional, integral y derivativa para encontrar el equilibrio óptimo para tu sistema. Además, verificar errores en los sensores y asegurarte de ajustar adecuadamente el controlador puede ayudar a resolver estos problemas.
¿Se puede usar un controlador PID para sistemas no lineales o sistemas con parámetros variables en el tiempo?
Sí, un controlador PID se puede utilizar para sistemas no lineales o sistemas con parámetros variables en el tiempo. Sin embargo, es importante tener en cuenta que existen limitaciones en su efectividad en estos casos.
El rendimiento de un controlador PID puede deteriorarse al lidiar con dinámicas no lineales o parámetros del sistema que cambian rápidamente. Para superar estos desafíos, se pueden utilizar diversas técnicas de ajuste para optimizar la respuesta del controlador PID y garantizar estabilidad y un rendimiento de control satisfactorio en tales situaciones.
¿Existen estrategias de control alternativas que se puedan utilizar junto con o en lugar de un controlador PID?
Existen estrategias de control alternativas disponibles que se pueden utilizar en conjunto con o en lugar de un controlador PID. Estas estrategias incluyen el control basado en modelos, el control adaptativo y el control lógico difuso.
Cada una de estas alternativas tiene sus propias ventajas y desventajas en comparación con un controlador PID. Por ejemplo, el control basado en modelos puede proporcionar un mejor rendimiento para sistemas complejos con dinámicas no lineales, pero requiere modelos precisos del sistema.
El control adaptativo puede manejar parámetros variables en el tiempo, pero puede tener problemas de estabilidad. El control lógico difuso puede lidiar con incertidumbres e información imprecisa, pero puede ser más difícil de diseñar y ajustar.
Conclusión
En conclusión, entender el funcionamiento de un controlador PID es crucial para sistemas de control eficientes.
Al analizar los componentes clave de un controlador PID, como el control proporcional, integral y derivativo, uno puede ajustar finamente el sistema para lograr los resultados deseados.
Es esencial seguir las mejores prácticas para ajustar y abordar problemas como el sobreimpulso y el tiempo de asentamiento.
Además, implementar técnicas de anti-saturación puede prevenir la inestabilidad.
Ya sea en la fabricación u otras industrias, dominar el control PID es vital para un rendimiento óptimo y solucionar problemas comunes.
Si quieres conocer otros artículos parecidos a 5 Claves para entender el funcionamiento de un controlador PID puedes visitar la categoría Componentes.
Deja una respuesta
¡Más Contenido!