3 Características Clave a Considerar al Configurar un Controlador PID
¿Estás configurando un controlador PID y quieres asegurarte de que lo haces correctamente?
En este artículo, discutiremos tres características clave que debes considerar.
Comprender los conceptos básicos del control PID es crucial, al igual que seleccionar el algoritmo de control adecuado.
También necesitarás determinar los parámetros proporcional, integral y derivativo para un rendimiento óptimo.
Al incorporar estas características en tu configuración, puedes asegurarte de que tu controlador PID funcione de manera fluida y eficiente.
- Entendiendo los fundamentos del control PID
- Selección del algoritmo de control adecuado
- Determinar los parámetros Proporcional, Integral y Derivativo
- Ajustando el controlador PID para un rendimiento óptimo
- Incorporando la ponderación de los puntos de ajuste para el control dinámico.
- Implementando mecanismos anti-saturación para prevenir el sobrepaso del límite.
- Utilizando el Control de Avance para Mejorar la Respuesta del Sistema
- Considerando las no linealidades y limitaciones en el diseño del control
- Evaluación de la tasa de muestreo y discretización temporal.
- Integrando el Control PID con los Sistemas de Supervisión
-
Preguntas frecuentes
- ¿Se puede utilizar un controlador PID tanto para sistemas lineales como no lineales?
- ¿Cómo afecta la tasa de muestreo al rendimiento de un controlador PID?
- ¿Cuáles son algunas limitaciones o desafíos comunes al implementar un controlador PID?
- ¿Es posible ajustar un controlador PID para múltiples condiciones de operación o puntos de consigna?
- ¿Cómo mejora el rendimiento de control en general la integración de un controlador PID con sistemas de supervisión?
- Conclusión
Entendiendo los fundamentos del control PID
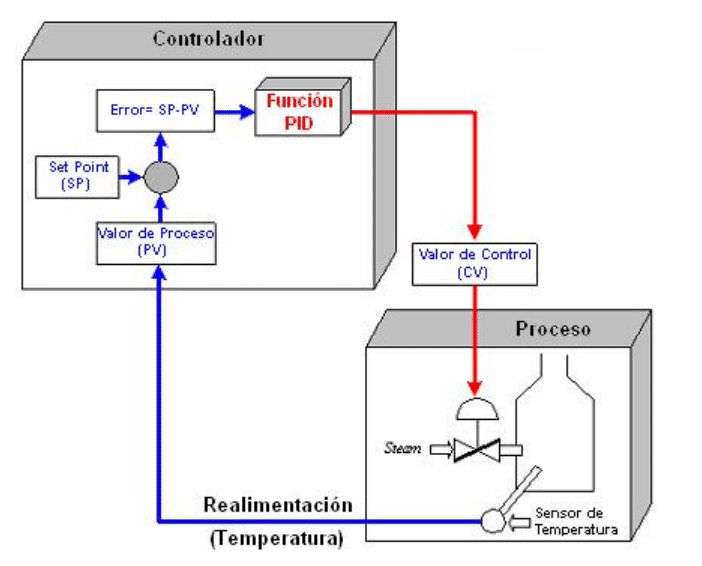
Para comprender los conceptos básicos del control PID, necesitarás entender cómo funcionan juntas las acciones proporcional, integral y derivada. El control PID se utiliza ampliamente en diversas aplicaciones donde se requiere un control preciso de un sistema. Ofrece varias ventajas sobre otros métodos de control, lo que lo convierte en una opción popular entre los ingenieros.
En el control PID, la acción proporcional ajusta la salida en función de la diferencia entre el punto de ajuste y la variable de proceso. Esta acción proporciona una respuesta rápida pero puede resultar en oscilaciones alrededor del punto de ajuste si se utiliza sola. La acción integral tiene en cuenta los errores pasados y ajusta continuamente la salida para eliminar cualquier error en estado estacionario. Esto ayuda a lograr precisión y estabilidad en el control de un sistema. Por último, la acción derivada considera la tasa de cambio de la variable de proceso y ajusta la salida en consecuencia. Ayuda a amortiguar cualquier cambio o perturbación rápida que pueda ocurrir.
La combinación de estas tres acciones permite un control efectivo en diversas aplicaciones como regulación de temperatura, control de velocidad de motores, control de caudal y regulación de presión. Los controladores PID se utilizan ampliamente en industrias como manufactura, robótica, ingeniería automotriz y procesamiento químico.
Una ventaja del control PID es su versatilidad. Se puede ajustar fácilmente para adaptarse a diferentes sistemas mediante la sintonización de sus parámetros según los requisitos específicos. Además, los controladores PID son relativamente simples de implementar y operar con requisitos de hardware mínimos.
Selección del algoritmo de control adecuado
Al seleccionar el algoritmo de control adecuado para un controlador PID, es importante tener en cuenta varios factores. Un aspecto crucial es la evaluación del rendimiento. Debes considerar qué tan bien se desempeñará el controlador en términos de estabilidad, tiempo de respuesta y precisión.
La estabilidad se refiere a la capacidad del controlador para mantener un estado estable sin oscilaciones o inestabilidad. El tiempo de respuesta se relaciona con qué tan rápido puede responder el controlador a los cambios en los valores de entrada o punto de consigna. La precisión mide qué tan cerca coincide la variable controlada con su valor deseado.
Otro factor a considerar es el tipo de sistema que se está controlando. Diferentes algoritmos de control funcionan mejor para tipos específicos de sistemas. Por ejemplo, si tienes un sistema no lineal, es posible que necesites un algoritmo más avanzado como un control adaptativo o predictivo basado en modelos.
También es esencial evaluar la complejidad y los requisitos computacionales de cada algoritmo. Algunos algoritmos pueden ser más intensivos computacionalmente que otros, lo que requiere procesadores más rápidos o hardware dedicado.
La selección del controlador también debe tener en cuenta la facilidad de implementación y ajuste. Sería beneficioso si el algoritmo elegido tiene parámetros sencillos que se puedan ajustar fácilmente para lograr un rendimiento óptimo.
Finalmente, ten en cuenta cualquier restricción o limitación en recursos como memoria o potencia de procesamiento al elegir un algoritmo de control.
 Determinar los parámetros Proporcional, Integral y Derivativo
Determinar los parámetros Proporcional, Integral y Derivativo
Para determinar los parámetros proporcionales, integrales y derivativos para su controlador PID, debe comenzar analizando la respuesta de su sistema a diferentes entradas y perturbaciones. Este paso es crucial para asegurarse de que su controlador esté correctamente ajustado y pueda regular efectivamente las variables de su proceso.
Aquí hay algunas consideraciones clave y métodos de ajuste que lo ayudarán a determinar estos parámetros:
-
Método de Ziegler-Nichols:
-
Comience estableciendo todos los parámetros PID en cero.
-
Aumente la ganancia proporcional hasta que la salida comience a oscilar.
-
Anote la ganancia máxima (Ku) y el período máximo (Tu).
-
Utilice estos valores para calcular los parámetros PID iniciales.
-
Método de Cohen-Coon:
-
Realice una prueba de paso en su sistema y registre la curva de respuesta.
-
Determine el tiempo que tarda la salida en alcanzar aproximadamente el 63% de su valor final (Tiempo de Retardo).
-
Calcule otras constantes de tiempo como la Constante de Tiempo del Proceso (Tp) y el Tiempo Muerto (Td).
-
Utilice estos valores para calcular los parámetros PID iniciales.
-
Método de prueba y error:
-
Comience con valores pequeños para cada parámetro.
-
Observe cómo los cambios en cada parámetro afectan la respuesta del sistema.
-
Ajuste según sea necesario hasta lograr el rendimiento deseado.
Es importante tener en cuenta que diferentes sistemas pueden requerir diferentes métodos de ajuste, ya que su dinámica puede variar significativamente. Además, se recomienda iterar a través de múltiples iteraciones de ajuste, ajustando finamente según sea necesario según las respuestas observadas del sistema.
Ajustando el controlador PID para un rendimiento óptimo
Puedes optimizar el rendimiento de tu controlador PID ajustando finamente sus parámetros utilizando diferentes técnicas de ajuste. Al iterar a través de múltiples iteraciones, puedes lograr las respuestas deseadas del sistema y mejorar el rendimiento general.
Existen varios métodos de ajuste que puedes utilizar para afinar tu controlador PID. Cada método tiene sus propias ventajas y consideraciones, por lo que es importante elegir el que mejor se adapte a tu aplicación específica.
Aquí hay una tabla que resume tres técnicas comunes de ajuste:
| Técnica | Ventajas | Consideraciones |
|---|---|---|
| Ziegler-Nichols | Simple y fácil de implementar | Puede provocar sobrepaso o inestabilidad |
| Cohen-Coon | Proporciona buena estabilidad | Requiere conocimiento de la dinámica del proceso |
| Modelo Interno | Robusto ante cambios en el sistema | Requiere un modelo preciso del sistema |
Utilizando estas técnicas de ajuste, puedes optimizar el rendimiento de tu controlador PID en función de tus requisitos específicos. Es importante tener en cuenta que lograr un rendimiento óptimo puede requerir múltiples iteraciones y ajustes hasta lograr las respuestas deseadas del sistema.
Incorporando la ponderación de los puntos de ajuste para el control dinámico.
La incorporación de la ponderación de puntos de consigna permite un control dinámico de su sistema, mejorando su capacidad de respuesta a los cambios en la salida deseada. Al asignar diferentes pesos a diferentes puntos de consigna, puede priorizar ciertos objetivos sobre otros, asegurando que su sistema responda de manera óptima a las condiciones cambiantes.
Aquí hay tres beneficios clave de incorporar la ponderación de puntos de consigna en la optimización de control:
-
Mejora de la estabilidad: La ponderación de puntos de consigna le permite asignar un mayor peso a los puntos de consigna críticos, asegurando que se les dé más importancia durante los cálculos de control. Esto ayuda a mantener la estabilidad y reducir los sobrepasos o las oscilaciones cuando hay cambios repentinos en la salida deseada.
-
Mayor capacidad de respuesta: Con la ponderación dinámica de puntos de consigna, puede ajustar los pesos relativos asignados a diferentes puntos de consigna según su importancia en un momento dado. Esta flexibilidad permite que su sistema responda rápidamente y con precisión a las variaciones en la salida deseada, lo que resulta en un mejor rendimiento general.
-
Adaptabilidad: La ponderación de puntos de consigna ofrece una forma de adaptar la estrategia de control según requisitos específicos o condiciones de funcionamiento. Por ejemplo, si un punto de consigna en particular se vuelve más crucial durante ciertas etapas de operación, puede aumentar su peso en consecuencia para garantizar una respuesta y rendimiento óptimos.
Implementando mecanismos anti-saturación para prevenir el sobrepaso del límite.
En el subtema anterior, aprendiste sobre la incorporación de la ponderación del punto de ajuste para el control dinámico. Ahora, cambiemos nuestro enfoque hacia otro aspecto importante de la configuración de un controlador PID: la implementación de mecanismos anti-saturación para prevenir el integral windup (sobrepaso).
El integral windup ocurre cuando el término integral del controlador PID se vuelve demasiado grande y provoca sobrepasos u oscilaciones prolongadas. Esto suele suceder cuando el sistema alcanza sus límites de saturación, como los valores máximos o mínimos de salida. Para evitar el integral windup, es crucial implementar mecanismos anti-saturación.
Un enfoque común se conoce como 'bumpless transfer' (transferencia sin saltos). Esta técnica garantiza una transición suave entre los modos de control manual y automático sin causar cambios bruscos en la salida. La transferencia sin saltos implica ajustar el término integral durante las transiciones de modo para que mantenga su valor actual al cambiar del control manual al control automático o viceversa.
Para lograr una transferencia sin saltos, puedes utilizar una señal adicional llamada 'tracking input' (entrada de seguimiento) que representa la diferencia entre el punto de ajuste deseado y la variable de proceso actual durante las transiciones de modo. Al restar esta entrada de seguimiento del cálculo del término integral, puedes evitar cambios bruscos en la salida debido a grandes errores acumulados durante la operación manual.
La implementación de la transferencia sin saltos requiere una ajuste cuidadoso y coordinación entre varios componentes de tu controlador PID. Es esencial asegurarse de que todos los parámetros estén ajustados y sincronizados correctamente para transiciones de modo sin problemas, evitando el integral windup.
Utilizando el Control de Avance para Mejorar la Respuesta del Sistema
Ahora, adentrémonos en cómo el uso del control de avance puede mejorar la respuesta del sistema. El control de avance es una técnica utilizada en sistemas de control para mejorar el rendimiento y la estabilidad de un sistema anticipándose a las perturbaciones y tomando medidas preventivas. Al incorporar el control de avance en su sistema, puede obtener varios beneficios:
-
Mejora en el rechazo de perturbaciones: El control de avance le permite anticipar y contrarrestar las perturbaciones antes de que afecten la salida del sistema. Este enfoque proactivo ayuda a minimizar las interrupciones causadas por factores externos.
-
Mejora en la respuesta transitoria: Con el control de avance, puede lograr respuestas más rápidas y precisas a los cambios en los puntos de ajuste o señales de referencia. Al utilizar el conocimiento sobre la dinámica del sistema, los controladores de avance pueden predecir las acciones correctivas necesarias de antemano, lo que conduce a un mejor comportamiento dinámico.
-
Aumento en el margen de estabilidad: La adición de un controlador de avance adecuadamente diseñado puede aumentar el margen de estabilidad general de su sistema. Al proporcionar una compensación temprana para las perturbaciones conocidas, el control de avance reduce la dependencia de las bucles de retroalimentación, que son propensos a problemas de inestabilidad.
Para implementar el control de avance de manera efectiva, siga estos pasos:
-
Identificar perturbaciones conocidas: Determine las fuentes de perturbaciones que tienen un impacto significativo en el rendimiento de su sistema.
-
Modelar los efectos de las perturbaciones: Desarrolle modelos matemáticos o relaciones empíricas que describan cómo afecta cada perturbación la salida de su sistema.
-
Diseñar acciones compensatorias: Utilice este conocimiento para diseñar acciones compensatorias adecuadas que contrarrestarán los efectos de cada perturbación.
Considerando las no linealidades y limitaciones en el diseño del control
Al diseñar sistemas de control, es crucial considerar la presencia de no linealidades que pueden afectar el rendimiento del sistema. Las no linealidades pueden introducir complejidades y desafíos para lograr los objetivos de control deseados. Además, los controladores PID tienen limitaciones inherentes, como la dificultad para manejar grandes retardos de tiempo e incertidumbres.
Para abordar estos problemas y mejorar el rendimiento del control, es necesario tener en cuenta las restricciones del sistema que pueden surgir debido a limitaciones físicas u operativas. Al comprender y gestionar eficazmente las no linealidades, las limitaciones de los controladores PID y las restricciones del sistema, los ingenieros pueden desarrollar diseños de control más robustos y eficientes.
Esta discusión profundizará en estos puntos clave para brindar ideas sobre cómo manejar estos desafíos de manera efectiva.
No linealidades en el diseño de control.
Para tener en cuenta las no linealidades en el diseño de control, deberás considerar cuidadosamente ciertas características clave al configurar un controlador PID. Las no linealidades pueden introducir complejidades y desafíos que deben abordarse para garantizar un control preciso y estable de un sistema.
Aquí hay algunos factores importantes a tener en cuenta:
-
No linealidades en sistemas de control:
-
Identificar y caracterizar las no linealidades específicas presentes en tu sistema.
-
Comprender cómo estas no linealidades afectan el comportamiento del sistema.
-
Desarrollar estrategias para mitigar o compensar los efectos de estas no linealidades.
-
Desafíos en el diseño de control:
-
Considerar incertidumbres en la modelización y variaciones en los parámetros del sistema.
-
Contemplar perturbaciones externas que pueden afectar el rendimiento de tu controlador.
-
Implementar técnicas de control robustas para manejar de manera efectiva las incertidumbres y perturbaciones.
Limitaciones de los controladores PID
A pesar de su uso generalizado, los controladores PID tienen ciertas limitaciones que pueden afectar su rendimiento y efectividad en el control de sistemas. Estas limitaciones se derivan de la simplicidad inherente del algoritmo de control PID.
Uno de los principales desafíos es lidiar con las no linealidades dentro de un sistema. Las no linealidades ocurren cuando la relación entre la entrada y la salida no es lineal, lo que resulta en respuestas no proporcionales. Esto puede llevar a errores e inestabilidad en el control.
Otra limitación es la incapacidad de los controladores PID para manejar de manera efectiva dinámicas complejas o procesos variables en el tiempo. Estos controladores están diseñados para sistemas lineales e invariantes en el tiempo y pueden tener dificultades para adaptarse a condiciones cambiantes o manejar sistemas con dinámicas complejas.
Además, ajustar un controlador PID puede ser un desafío, ya que requiere encontrar valores apropiados para sus tres parámetros: ganancia proporcional, ganancia integral y ganancia derivativa. Encontrar estos valores óptimos a menudo implica ensayo y error o técnicas sofisticadas de optimización.
Comprender estas limitaciones es crucial para que los ingenieros tomen decisiones informadas al seleccionar estrategias de control para diferentes aplicaciones.
Manejo de las restricciones del sistema
Puede enfrentar desafíos al manejar las limitaciones del sistema, ya que pueden afectar el rendimiento y la efectividad de sus estrategias de control. Para asegurarse de poder superar estos desafíos de manera efectiva, es importante considerar ciertos factores clave.
Aquí hay tres sub-listas que lo ayudarán a lidiar con las limitaciones del actuador y manejar las perturbaciones de manera efectiva:
-
Limitaciones del actuador:
-
Comprenda las limitaciones de sus actuadores, como sus rangos de funcionamiento máximo y mínimo.
-
Tenga en cuenta cualquier retraso en el tiempo de respuesta o límites de saturación que puedan afectar el rendimiento del sistema de control.
-
Implemente medidas apropiadas para compensar las no linealidades o histéresis del actuador.
-
Manejo de perturbaciones:
-
Identifique las posibles perturbaciones que podrían afectar el rendimiento de su sistema.
-
Desarrolle estrategias para mitigar estas perturbaciones, como el uso de control feedforward o la implementación de algoritmos de control adaptativo.
-
Monitoree y analice continuamente la respuesta del sistema a las perturbaciones, realizando ajustes según sea necesario.
Evaluación de la tasa de muestreo y discretización temporal.
Para optimizar el rendimiento de su controlador, es crucial considerar la tasa de muestreo y la discretización del tiempo.
La tasa de muestreo determina con qué frecuencia se toman y procesan las mediciones del sistema, lo que afecta la precisión de las acciones de control.
Además, una adecuada discretización del tiempo garantiza que la dinámica en tiempo continuo se represente con precisión en un sistema de tiempo discreto.
En última instancia, seleccionar valores apropiados para estos parámetros puede tener un gran impacto en el rendimiento general y la estabilidad de su controlador.
Importancia de la tasa de muestreo
Una cosa a tener en cuenta es que elegir una tasa de muestreo adecuada es crucial al configurar un controlador PID. La tasa de muestreo, o el tiempo entre mediciones consecutivas, tiene un impacto significativo en el rendimiento del controlador. Aquí hay algunos puntos clave a considerar con respecto a la importancia de la tasa de muestreo:
-
Impacto del tiempo de muestreo:
El tiempo de muestreo determina con qué frecuencia el controlador actualiza su salida en función de las nuevas mediciones. Un tiempo de muestreo más corto permite una respuesta más rápida a los cambios en el sistema. Por el contrario, un tiempo de muestreo más largo puede llevar a tiempos de respuesta más lentos. -
Compromiso entre precisión y velocidad de cálculo:
Aumentar la tasa de muestreo mejora la precisión al proporcionar más puntos de datos para los cálculos de control. Sin embargo, las tasas de muestreo más altas también aumentan los requisitos de cálculo y pueden sobrecargar los recursos del sistema.
Encontrar el equilibrio adecuado entre precisión y velocidad de cálculo es esencial al seleccionar una tasa de muestreo adecuada para la configuración de su controlador PID.
Consideraciones de discretización temporal
Ahora que comprendes la importancia de la tasa de muestreo en la configuración de un controlador PID, adentrémonos en las consideraciones para la discretización del tiempo. La discretización del tiempo se refiere al proceso de dividir el tiempo en intervalos o pasos discretos. La selección de un paso de tiempo adecuado es crucial para lograr un rendimiento de control preciso.
Al elegir un paso de tiempo, se deben considerar varios factores, como la dinámica del sistema y los recursos computacionales. Es esencial encontrar un equilibrio entre precisión y tiempo de cálculo.
Para ayudarte a tomar una decisión informada, considera la siguiente tabla que describe las técnicas de discretización de tiempo comúnmente utilizadas:
| Técnica | Descripción |
|---|---|
| Método de Euler | La técnica más simple donde se aproxima el valor futuro utilizando el valor actual y la derivada. |
| Método de Heun | Versión mejorada del método de Euler que estima valores intermedios antes de calcular el resultado final. |
| Métodos de Runge-Kutta | Familia de métodos numéricos que utilizan promedios ponderados de múltiples evaluaciones para mejorar la precisión. |
| Diferencia hacia atrás | Basado en la aproximación de diferencia hacia atrás, donde se estiman valores futuros utilizando valores anteriores y se utilizan derivadas en momentos posteriores. |
Impacto en el rendimiento del controlador
La selección de un paso de tiempo apropiado para la discretización temporal puede afectar significativamente el rendimiento del controlador. Al elegir un paso de tiempo, es importante considerar la estabilidad del controlador y la dinámica del sistema. Aquí hay algunos factores clave para tener en cuenta:
-
Estabilidad del controlador:
-
El paso de tiempo debe ser lo suficientemente pequeño como para garantizar la estabilidad. Si el paso de tiempo es demasiado grande, puede provocar inestabilidad y oscilaciones en la señal de control.
-
Por otro lado, si el paso de tiempo es demasiado pequeño, puede introducir una sobrecarga computacional innecesaria sin una mejora significativa en el rendimiento.
-
Dinámica del sistema:
-
El paso de tiempo debe seleccionarse en función de la dinámica del sistema controlado. Diferentes sistemas tienen diferentes tiempos de respuesta, y elegir un paso de tiempo adecuado garantiza una representación precisa de estas dinámicas.
-
Es crucial encontrar un equilibrio entre capturar dinámicas de cambio rápido y mantener la eficiencia computacional.
Integrando el Control PID con los Sistemas de Supervisión
La integración del control PID con sistemas de supervisión puede mejorar el rendimiento general del sistema de control. Al combinar la potencia del control PID con el aprendizaje automático y el mantenimiento predictivo, se puede lograr un sistema de control más eficiente y confiable.
Al integrar el control PID con el aprendizaje automático, el sistema puede adaptarse a las dinámicas cambiantes y optimizar su rendimiento en función de los datos históricos. Esto permite un mejor control de procesos complejos que pueden tener un comportamiento variable o no lineal. La combinación del control PID y los algoritmos de aprendizaje automático permite que el sistema aprenda de experiencias pasadas y tome decisiones inteligentes en tiempo real.
Además, la integración del control PID con el mantenimiento predictivo puede ayudar a mejorar la confiabilidad de su sistema de control. Al monitorear continuamente parámetros clave, como la temperatura o la presión, se pueden detectar posibles problemas antes de que se conviertan en fallas críticas. Este enfoque proactivo permite tomar acciones de mantenimiento oportunas, minimizando el tiempo de inactividad y reduciendo costos.
Para ilustrar visualmente estos beneficios, considere la siguiente tabla:
| Beneficio | Integración del Control PID con el Aprendizaje Automático | Integración del Control PID con el Mantenimiento Predictivo |
|---|---|---|
| Mejor Rendimiento | Se adapta a las dinámicas cambiantes basándose en datos históricos | Detecta de manera proactiva posibles problemas antes de que se conviertan en críticos |
| Mayor Eficiencia | Optimiza el control en procesos complejos con comportamiento variable | Minimiza el tiempo de inactividad a través de acciones de mantenimiento oportunas |
| Reducción de Costos | Reduce el consumo de energía mediante la optimización de estrategias de control | Minimiza los costos de reparación al prevenir fallas importantes |
Preguntas frecuentes
¿Se puede utilizar un controlador PID tanto para sistemas lineales como no lineales?
Sí, un controlador PID se puede utilizar tanto para sistemas lineales como no lineales. Sin embargo, hay ventajas y desventajas a considerar al utilizar un controlador PID para sistemas no lineales.
En sistemas lineales, los controladores PID son conocidos por su excelente rendimiento en términos de estabilidad y precisión.
Sin embargo, en sistemas no lineales, el rendimiento de los controladores PID puede variar dependiendo de la complejidad del sistema. Es importante analizar cuidadosamente el comportamiento del sistema no lineal antes de determinar si un controlador PID es adecuado.
¿Cómo afecta la tasa de muestreo al rendimiento de un controlador PID?
La frecuencia de muestreo tiene un efecto significativo en el rendimiento de un controlador PID. Una frecuencia de muestreo más alta permite actualizaciones más frecuentes y una respuesta más rápida a los cambios en el sistema.
Sin embargo, tasas de muestreo excesivamente altas pueden llevar a una carga computacional innecesaria y introducir ruido en el sistema de control.
Por lo tanto, es importante determinar la frecuencia de muestreo óptima que encuentre un equilibrio entre la capacidad de respuesta y la eficiencia computacional para garantizar el funcionamiento eficiente del controlador PID.
¿Cuáles son algunas limitaciones o desafíos comunes al implementar un controlador PID?
Cuando implementas un controlador PID, puedes encontrarte con varias limitaciones y desafíos. Estos pueden incluir problemas para ajustar los parámetros del controlador, ya que encontrar los valores adecuados para las ganancias proporcional, integral y derivativa puede ser complicado.
Otro desafío es lidiar con no linealidades en el sistema que se está controlando, lo cual puede afectar el rendimiento del controlador.
Además, limitaciones como autoridad de control limitada o saturación de actuadores también pueden impactar la efectividad de un controlador PID.
¿Es posible ajustar un controlador PID para múltiples condiciones de operación o puntos de consigna?
Sí, es posible ajustar un controlador PID para múltiples condiciones de operación o puntos de consigna. Métodos de ajuste como Ziegler-Nichols, Cohen-Coon y ajuste manual se pueden utilizar para ajustar los parámetros del controlador en función de requisitos específicos.
Las mejores prácticas consisten en tener en cuenta la dinámica del proceso, el tiempo de respuesta deseado y los criterios de estabilidad al seleccionar los métodos de ajuste adecuados. Al optimizar el controlador PID para diferentes condiciones de operación o puntos de consigna, se puede lograr un mejor rendimiento de control y asegurar un comportamiento óptimo del sistema.
¿Cómo mejora el rendimiento de control en general la integración de un controlador PID con sistemas de supervisión?
Integrar un controlador PID con sistemas de supervisión puede mejorar en gran medida el rendimiento general del control. Al combinar algoritmos de control avanzados con el controlador PID, se puede beneficiar de una mayor estabilidad y rendimiento.
La integración permite ajustar de manera más precisa los parámetros del PID, lo que resulta en una mejor respuesta del sistema y en una reducción de las oscilaciones. Este enfoque también permite estrategias de control adaptativo que pueden ajustarse a los cambios en las condiciones de operación o en los puntos de ajuste, asegurando un control óptimo en todo momento.
En última instancia, integrar un controlador PID con sistemas de supervisión maximiza la eficiencia y la efectividad en el control de procesos complejos.
Conclusión
En conclusión, configurar un controlador PID implica varias características clave que deben ser cuidadosamente consideradas.
Es importante entender los fundamentos del control PID y seleccionar el algoritmo de control adecuado para su sistema. Determinar los parámetros proporcionales, integrales y derivativos, y ajustar el controlador son cruciales para un rendimiento óptimo.
Además, incorporar ponderación del punto de ajuste, control de realimentación anticipada y considerar las no linealidades y limitaciones en el diseño del control juegan un papel vital.
Evaluar la tasa de muestreo e integrar el control PID con sistemas de supervisión completan el proceso de configuración.
Si quieres conocer otros artículos parecidos a 3 Características Clave a Considerar al Configurar un Controlador PID puedes visitar la categoría Componentes.
Deja una respuesta
¡Más Contenido!